XiaoMi-AI文件搜索系统
World File Search System尖端

2050 年美国太空战略:塑造尖端领域
太空用途。但是,语言过于模糊、陈旧,并且天真地认为太空活动将保持和平。在冷战期间,太空的浩瀚以及美国和苏联的主导地位使得对在轨卫星的监管有些简单。但是,今天,轨道上大约有 3,000 颗运行卫星,另有 25,000 块碎片由政府跟踪。这种增长是由太空企业家推动的,他们竞相将数千颗卫星发射到低地球轨道 (LEO),为仍然无法上网的 40 亿人提供互联网连接。有人预测,未来 30 年内可能会有 10 万颗卫星在轨。虽然这些卫星可以提供的服务有明显的好处,但如果没有明确的“交通规则”,LEO 的拥挤可能会导致灾难。资源开采是另一个需要解决的挑战,以缓解随着太空太阳能发电逐渐成熟、小行星开采稀有金属以及在太空生产燃料用于新的太空商业和安全目的而必然会出现的担忧。签署和批准的太空条约并未充分考虑未来的太空现实——月球殖民、太空旅游、小行星采矿、火星居住和其他太空活动。这些新活动的很大一部分
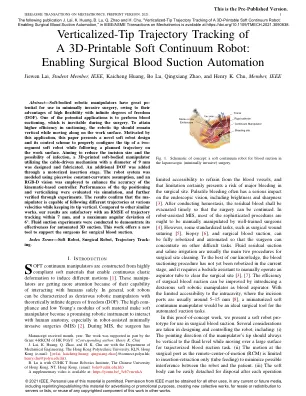
3D打印机软件机器人的垂直尖端轨迹跟踪:启用手术血液吸力自动化
摘要 - 富有的机器人操纵器在微创手术中非常有用,这是由于它们具有高度灵活性的优势,并具有无限的自由度(DOF)。潜在的应用之一是进行吸血,这在手术过程中是不可避免的。为了在吸力方面提高效率,机器人尖端应保持垂直,同时沿工作表面移动。是出于本应用的激励,本文提出了一种新颖的软机器人设计及其控制方案,以正确配置两段软机器人的尖端,同时遵循工作表面上的计划轨迹。旨在减少切口尺寸和感染的可能性,设计和制造了直径为9毫米的电缆驱动机构的3D打印的柔软的操纵器。通过电动插入阶段添加了额外的DOF。使用分段恒定曲率假设对机器人系统进行建模,并采用RGB-D视觉来增强基于运动学的控制器的准确性。通过模拟评估了尖端定位和垂直化的性能,并通过实验进一步验证。结果证实了Ma-nipulator能够在各种速度下遵循不同轨迹的同时保持其尖端垂直。与其他类似的作品相比,我们的结果是在7 mm以内的轨迹跟踪RMSE和6°的最大角度偏差之内令人满意的。流体吸力实验,以证明其自动3D吸力的有效性。这项工作提供了一种新工具,可以支持外科医生进行手术吸血。

不同尖端形状金属鱼叉捕获空间碎片的穿透特性
作者之前研究过使用金属鱼叉清除空间碎片,并开发了相应的数值模拟模型。(6)金属鱼叉尖端的形状被认为对穿透行为有很大影响。但目前主要研究的是锥形鱼叉尖端,其他鱼叉尖端形状的研究还不够。此外,很少有研究考察以斜角方向穿透碎片的情况。如果鱼叉有锥形尖端,当碎片的倾斜角超过鱼叉尖端角的一半时,鱼叉就不会穿透碎片。因此,需要适当设计鱼叉尖端的形状,以便以任何角度穿透碎片。然而,也存在锚太深入或穿过目标的潜在问题,使系绳容易被锚穿透造成的撞击孔的毛边切断。因此,在本研究中,我们研究了不同尖端形状的金属鱼叉与不同穿透条件下的穿透行为之间的关系。

尖端的HomeHub技术 - 智能和可持续性
模块化的住宅储能我们的世界正面临越来越快的气候变化。我们需要处理当前的状况,并开始将机会变成行动。我们的重点需要从有限的资源转向可持续资源,以保护我们的环境和后代。因此,我们需要以对可再生能源的责任和热情面对气候变化。作为一家公司,我们希望对我们的环境做出明确的陈述和明确的贡献,并使每个人随时使用可再生能源更加独立。我们很高兴向您介绍自己。我们是德国基地的GS Hub GmbH。我们是一家由国际团队领导的公司,在可再生能源市场上拥有数十年的经验和专业知识。我们将我们的技能和思维方式专门针对太阳能,尤其是用于太阳能的电池存储系统。GS集线器团队在光伏,太阳能,存储系统,电子和软件方面具有经验和专业知识。我们的最新产品是在电池存储行业中为太阳能设置新的英里石,并结合了性能,质量和设计的最高标准。在这里,您可以找到我们的电池存储系统的子弹点,名为HomeHub:•锂铁磷酸锂化学

隧道的各种金属尖端的系统电化学蚀刻
a)应向信件解决的作者:jianwangphysics@pku.edu.cn抽象硬点接触光谱和扫描探针显微镜/光谱是研究具有强大可扩展性的材料的强大技术。为了支持这些研究,需要具有各种物理和化学特性的技巧。为了确保实验结果的可重复性,应标准化尖端的制造,并应设置可控且方便的系统。在这里,提出了一种用于制造各种技巧的系统方法,涉及电化学蚀刻反应。反应参数分为四类:解决方案,电源,浸入深度和中断。设计和构建了蚀刻系统,以便可以准确控制这些参数。使用该系统,探索和标准化了铜,银,金,铂/虹膜合金,钨,铅,铅,铁,铁,镍,钴和薄金的蚀刻参数。在这些技巧中,探索并标准化了白银和尼伯族的新食谱。进行光学和扫描电子显微镜,以表征尖锐的针头。用蚀刻的银色尖端进行了相关的点接触实验,以确认被制成尖端的适用性。I.引言是研究超导体的强大工具,点接触光谱(PC)技术已成功地应用于对具有各种特性的材料的研究。1-8在实验中,PC被归类为软点接触和硬点接触。7-13前者通常使用银色涂料形成点接触。硬点接触中的技巧用法使PC具有更多的可能性。传统上,通过PCS,可以方便地测量超导体的超导差距和配对对称性,以及通过PCS进行的有关准二粒激发(例如镁质和声子)的能量信息。1-5近年来,在硬点接触实验中发现了尖端诱导的或增强的超导性,其机制归因于局部掺杂效应,局部高压效应和对边界的界面效应。
东京大学与谷歌合作实现人工智能共生未来社会 东京大学 (UT) 与谷歌合作实现人工智能共生未来社会。我们很高兴地宣布,我们已签署合作协议和在这一举措中,我们将与所有人共享我们创造的新知识,并以解决全球问题为目标开展研究。我们还将通过研究和教育合作共同创造知识,为社会做出贡献,引领未来。我们旨在培养下一代人才。未来两年,双方将开展以下方面的合作:研究合作:利用谷歌在人工智能研究方面的尖端知识和技术基础,并汇集东京大学广泛而优秀的专业知识和研究能力,我们将致力于解决各种社会问题,并开发人工智能可以帮助人们并共同努力实现互利共存的未来社会。两家公司计划在一系列领域开展合作,包括未来在自然语言处理等领域的潜在联合研究,这些领域技术和人工智能专业知识可以做出重大贡献。人力资源开发:培养下一代研究人才极其重要,他们将成为推动人工智能研究发展的推动力。它为学生提供智力刺激和社交机会,帮助他们做出职业决策。其中包括博士生奖学金计划、指导课程、实习和国际研究交流计划。提供资源和工具:
关于东京大学与谷歌合作实现“人工智能互惠未来社会” 东京大学(东京大学)和谷歌正在合作实现“人工智能互惠未来社会”。我们已经建立了伙伴关系。在这一举措中,我们将与所有人分享我们共同创造的新知识,推进以解决全球性问题为目标的研究,通过研究合作共同创造知识,为社会做出贡献并在未来发挥作用我们的目标是培养下一代人力资源。未来两年,双方将合作开展以下活动: 研究合作:我们将利用谷歌尖端的人工智能研究知识和技术基础,汇集东京大学全校范围广泛且出色的专业知识和研究能力,解决多样化的社会问题,将人工智能与人联系起来。合作实现互利共生的未来社会。未来,我们计划在多个领域进行合作,包括在自然语言处理等领域进行联合研究,我们在技术和人工智能方面的专业知识可以做出重大贡献。 人力资源开发:培养下一代研究人员极其重要,他们将成为推进人工智能研究的驱动力。我们为学生提供智力刺激和建立人际网络的机会,帮助他们做出职业决策。这包括博士生奖学金计划、指导课程、实习和国际研究交流计划。 提供资源和工具:

使用 IN718 修复复杂形状涡轮叶片尖端的工艺开发
涡轮叶片运行过程中最常见的缺陷之一是叶尖磨损,这会导致叶片报废。增材制造 (AM) 可以通过激光材料沉积 (LMD,也称为直接能量沉积,DED) 工艺进行修复,从而避免成本高昂的整个叶片更换。由于该应用与工业相关,因此关于 LMD 工艺所用的确切沉积策略和工艺参数的信息非常有限。本研究中使用的叶片几何形状的特点是轮廓横截面在叶片高度上的变化。此外,轮廓围绕其骨架线中心旋转,这称为扭曲。此外,轮廓沿其肌腱线向前缘移动,这称为前扫。首先,确定一组合适的工艺参数,通过这些参数可以制造无孔隙和无裂纹的 IN718 基本探头。为了将这些参数转移到涡轮叶片上,研究了各种工艺策略,这些策略既考虑了敏感的叶片几何形状,也考虑了所用生产系统的运动学。这些策略包括轮廓和舱口轨道的调整、合适的飞入和飞出策略的设计,以及悬垂生产的措施。通过将修复后的叶片与其目标几何形状与光学测量进行比较,可以评估工艺后的形状精度。总之,所用的三维构建策略能够稳定地再现扭曲和前掠,并实现足够的加工余量。因此,所开发的工艺代表了复杂叶片几何形状的叶尖损伤近净形修复的基本解决方案,可应用于其他叶片几何形状。

裂纹尖端变形和疲劳的全场表征...
量化疲劳裂纹扩展对于断裂关键工程部件和结构的损伤容限评估至关重要。疲劳裂纹扩展表征历史上的第一个重大事件是使用应力强度因子范围 D K 来关联疲劳裂纹扩展速率,由 Paris 等人 1 基于三项独立研究得出。Rice 2 在连续力学框架内进一步合理化了这种方法,认为疲劳裂纹扩展速率数据可能与应力强度因子范围相关。此后,人们普遍认为,在小规模屈服 (SSY) 条件下的大多数工程应用中,使用弹性应力强度因子范围 D K 就足够了,尽管大约在同一时间人们也认识到了载荷比 R 的作用,3
裂纹尖端变形和疲劳的全场表征...
量化疲劳裂纹扩展对于断裂关键工程部件和结构的损伤容限评估非常重要。疲劳裂纹扩展表征历史上的第一个重大事件是使用应力强度因子范围 D K 来关联疲劳裂纹扩展速率,由 Paris 等人 1 基于三项独立研究得出。Rice 2 在连续力学框架内进一步合理化了这种方法,认为疲劳裂纹扩展速率数据可能与应力强度因子范围相关。此后,人们普遍认为,在小规模屈服 (SSY) 条件下的大多数工程应用中,使用弹性应力强度因子范围 D K 就足够了,尽管大约在同一时间人们也认识到了载荷比 R 的作用, 3

使用条带屈服力学模拟裂纹尖端损伤累积导致的疲劳裂纹扩展
Elber 在 70 年代早期发现疲劳裂纹可以在拉伸载荷下闭合,并假设疲劳裂纹扩展 (FCG) 将由 D K eff = K max � K op 控制,其中 K max 和 K op 分别是应力强度因子的最大值和开口值。该假设可以合理化在使用载荷下观察到的许多瞬态效应,但它无法解释许多其他效应,如在高 R = K min / K max 下过载后 FCG 的延迟或停止,当 K min > K op 时;在高度可变的 D K eff 下以恒定速率进行的 FCG;在给定 R 下停止的裂纹可以在较低的 R 下重新启动生长而不改变其 D K eff;或 FCG 在惰性环境中对 R 不敏感。尽管如此,基于 D K eff 思想的带材屈服模型 (SYM) 比基于任何其他原理的替代模型更常用于 FCG 寿命预测。为了验证 SYM 是否确实本质上更好,它们的力学原理用于预测 FCG 速率,这既基于 Elber 的想法,也基于另一种观点,即 FCG 是由于裂纹尖端前方的损伤积累造成的,这不需要 D K eff 假设或任意数据拟合参数。尽管基于相互冲突的原理,但这两种模型都可以很好地再现准恒定 D K 载荷下获得的 FCG 数据,这是一个有点令人惊讶的结果,值得仔细分析。� 2017 Elsevier Ltd. 保留所有权利。