XiaoMi-AI文件搜索系统
World File Search System层次化

层次化任务分析 - MyCourses
层次化任务分析 (HTA) 由赫尔大学于 20 世纪 60 年代末开发,旨在满足人们对理解复杂非重复性操作员任务所需技能的理性基础的需求,尤其是钢铁生产、化学和石油精炼以及发电中的过程控制任务。当时可用的主要分析工具要么来自经典工作研究(Gilbreth,1911;Taylor,1911),要么来自基于心理测量结构的技能分类法。工作研究提供了一组简单的单元,如“选择”、“掌握”和“组装”,描述重复的手动操作,但对于监控、控制和决策等“脑力”工作却不足。Gilbreth 的一些单元,例如“选择”,暗示了认知过程,但并没有认真尝试阐述或分析潜在的心理活动。

协作人工智能的层次化框架
我们提出了一个协作智能系统的分层框架。该框架根据协作活动的性质和必须共享的信息来组织研究挑战,每个级别都建立在较低级别提供的功能之上。我们回顾了每个级别的研究范式,描述了基于工程的经典方法和基于机器学习的现代替代方案,并使用假设的个人服务机器人进行了示例说明。我们讨论了各个级别上出现的跨领域问题,重点关注沟通和共享理解的问题、解释的作用以及协作的社会性质。最后,我们总结了研究挑战,并讨论了通过与智能系统的协作来增强人类能力并赋予人类和社会权力的技术可能带来的经济和社会影响。

化学化学
This course aims at introducing the basic concepts and techniques in carrying out chemical analysis by using various modern spectroscopic and chromatographic instruments.Students will learn how to use modern instruments to determine the amounts of substances present in a mixture down to part per million levels (ppm), and identify the structure of a compound.Techniques such as UV-visible spectroscopy, infrared spectroscopy, mass spectrometry, nuclear magnetic resonance spectroscopy, gas chromatography and high performance liquid chromatography will be covered.This course will also discuss some common standard practices of collecting and preparing samples for laboratory testing, the accreditation system in testing laboratories.This course is conducted in the format of lecture.本课程旨在介绍化学分析中所用到的现代光谱和色谱仪器的基本概念和技术。学生将学习使用该 等仪器来分析浓度水平低至百万分之一的物质,并确定化合物的结构。课程内容包括紫外 − 可见光 谱法、红外线光谱法、质谱分析法、核磁共振、气相色谱法及高效能液相色谱法的操作技巧,以 及化验工作中的收集及制备样本的常用标准技巧和香港化验室所实行的认可系统。课程以讲课形 式进行。 Medium of Instruction:
IT和AI的发展、地方创生、少子化对策
资料来源:https://towardsdatascience.com/machine-learning-methods-to-aid-in-coronavirus-response-70df8bfc7861、https://bdtechtalks.com/2020/03/09/artificial-intelligence-covid-19-coronavirus/、https://news.yahoo.co.jp/byline/kazuhirotaira/20200326-00169744/

大脑在多步预期过程中以层次化的方式呈现过去和未来
环境在各个序列中是不同的。参与者总共学习了四个序列:一条绿色和蓝色路径,包含一组八个环境,另一条绿色和蓝色路径,包含一组不同的八个环境。为了便于说明,这里只描绘了一条绿色和一条蓝色路径。(b)故事生成。为了学习环境的顺序,参与者为每条路径生成故事,以按顺序链接环境。参与者被告知将最终环境链接回第一个环境以创建一个循环。(c)虚拟现实训练。参与者随后在沉浸式虚拟现实中以绿色路径顺序和蓝色路径顺序探索环境,同时排练他们的故事。在给定的环境中,会出现一个绿色和蓝色的球体。触摸这些球体时,参与者会按照相应的(绿色或蓝色)序列传送到下一个环境。然后,参与者回忆起四个序列中的每一个的顺序(未显示)。环境图像是游戏引擎 Unity 中从可用于商业用途的资产创建的 3D 环境的屏幕截图。

大脑在多步预期过程中以层次化的方式呈现过去和未来
时间结构的记忆既可以规划未来事件,也可以回顾过去事件。我们研究了大脑在预期过程中如何灵活地表示过去和未来的扩展时间序列。参与者在沉浸式虚拟现实中学习环境序列。序列对具有相同的环境,但顺序不同,从而实现特定于上下文的学习。在 fMRI 期间,参与者以给定的顺序预测未来多个步骤的即将到来的环境。时间结构在海马体和高阶视觉区域中以 (1) 双向表示,具有对过去和未来的分级表示和 (2) 分层表示,过去和未来的进一步事件在连续更靠前的大脑区域中表示。在海马体中,这些双向表示是特定于上下文的,而对遥远环境的抑制可以预测预期中的响应时间成本。总之,这项工作揭示了我们如何灵活地表示顺序结构以实现跨多个时间尺度的规划。
使用 TiOx 作为电阻层的电阻存储器的制造
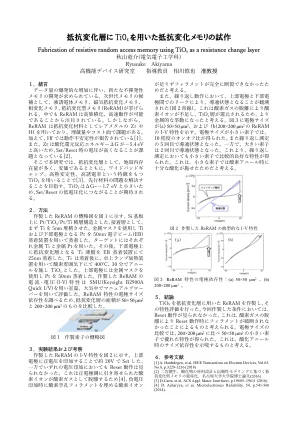
图 3 ReRAM 特性的电极依赖性:(a) 50×50 μm 2 ,(b) 200×200 μm 2 。 5.结论我们利用 TiO x 作为电阻变化层制作了 ReRAM,并评估了其特性。在本次创建的条件下,没有观察到复位操作。这被认为是因为在复位操作过程中,由于氧气的释放,灯丝没有断裂。比较电极尺寸,50×50 μm2 的较小元件与 200×200 μm2 的元件相比,可获得更优异的特性。这被认为表明了氧化退火过程中的尺寸依赖性。 6.参考文献 [1] A. Hardtdegen 等,IEEE Transactions on Electron Devices,第 65 卷,第 8 期,第 3229-3236 页 (2018) [2] Takeo Ninomiya,基于氧化物材料设计和可靠性建模的电阻式存储器量产,名古屋大学研究生院博士论文 (2016) [3] D.Carta 等,ACS Appl. Mater. Interfaces,第 19605-19611 页 (2016) [4] D. Acharyya 等,微电子可靠性。54,第 541-560 页 (2014)。

致密碳化硼基陶瓷的强韧化机理研究进展
Liu 等 [36] 在 1950 ℃ 和 50 MPa 压力的 SPS 过 程中,发现随着 TiB 2 的添加量由 5 mol% 增至 30 mol% ,复合陶瓷的硬度降低,断裂韧性增加。 除裂纹偏转和 TiB 2 的钉扎效应使 B 4 C 晶粒细化 ( 从 1.91 μm 减至 1.67 μm) 外,两相间位错的产生, 是 B 4 C 陶瓷增强、增韧的次要原因,其在陶瓷断 裂前吸收能量,造成局部强化 [37–38] 。研究发现, 添加 20 mol% TiB 2 时,复合陶瓷的相对密度为 97.91% ,维氏硬度为 (29.82±0.14) GPa ,断裂韧性 为 (3.70±0.08) MPa·m 1/2 。 3.1.2 Ti 单质引入 与直接添加 TiB 2 相比,在烧结过程中原位反 应生成 TiB 2 可以在较低的烧结温度下获得更高 的密度和更好的机械性能。 Gorle 等 [39] 将 Ti-B( 原 子比 1:2) 混合粉体以 5 wt.% 、 10 wt.% 和 20 wt.% 的比例加入到 B 4 C 粉末中,研磨 4 h 后通过 SPS 在 1400 ℃ 下获得致密的 B 4 C 复合陶瓷。由于 WC 污染,获得了由被 (Ti 0.9 W 0.1 )B 2 和 W 2 B 5 的细颗粒 包裹的 B 4 C 颗粒组成的无孔微结构。当 Ti-B 混合 物的量从 5 wt.% 增至 20 wt.% 时,烧结活化能从 234 kJ·mol −1 降至 155 kJ·mol −1 。含 5 wt.% Ti-B 混 合物的 B 4 C 复合材料的最大硬度为 (3225±218) HV 。由于 TiB 2 的原位形成反应是高 度放热并释放大量能量的自蔓延反应,因此,原 料颗粒界面间的实际温度预计高于 SPS 烧结温 度,同时,液相 W 2 B 5 的形成润湿了 B 4 C 表面, 有助于降低 B 4 C 晶粒的界面能,并加速了沿晶界