XiaoMi-AI文件搜索系统
World File Search System层次


加密消息传递的私人层次治理
摘要 - 仇恨,骚扰和其他形式的在线虐待造成的危害增加,促使主要平台探索等级治理。这个想法是允许社区指定的成员承担节制和领导职责;同时,成员仍然可以将问题升级到平台。但是,这些有前途的方法仅在社区内容公开对平台的明文设置中进行了探索。目前尚不清楚如何在利用端到端加密(E2EE)消息传递隐私的大量在线社区中实现层次治理。我们提出了私人层次治理系统。这些应该使社区治理能够与明文设置相似的社区治理,同时保持未报告的内容和治理行动的加密隐私。我们设计了第一个这样的系统,采用了一种分层方法,该方法在加密消息协议之上添加了治理逻辑;我们展示了如何扩展消息层安全性(MLS)协议su ffi ces,以实现丰富的治理策略。我们的方法使开发人员能够快速原型新的治理功能,从称为Polypectkit的明文系统中获得灵感。我们构建了一个名为MLSGOV的原型E2EE消息传递系统,该系统支持基于内容的社区和平台审核,选举社区主持人,投票以删除虐待用户等等。

层次结构自动组织系统...
由于动态和不可预测的开放世界设置,在Minecraft中导航的复杂环境对多代理系统构成了重大挑战。代理必须与环境互动,并与其他代理人协调其行动以实现共同目标。然而,传统方法通常难以有效地管理代理间的沟通和任务分配,这对于有效的多代理导航至关重要。此外,对代理人了解其目标并成功,全面浏览环境至关重要,处理和集成多模式信息(例如视觉,文本和听觉数据)至关重要。为了解决此问题,我们设计了具有框架来自动化基于LLM的代理以完成导航任务。在我们的方法中,我们设计了一个层次自动组织导航系统,该系统的特征是1)用于多机构组织的层次结构系统,以确保集中式计划和分散的执行; 2)自动组织和内部通信机制,在子任务下进行动态组调整; 3)多模式

空间分子曲线沿感觉运动相关轴塑造人小脑层次结构
Yaping Wang, 1,2 Yufan Wang, 2 Haiyan Wang, 2 Liang Ma, 2 Simon B. Eickhoff, 5,6 Kristoffer Hougaard Madsen, 1,7,8 Congying Chu, 2, * and Lingzhong Fan 1,2,3,4,9, * 1 Sino-Danish Center, University of Chinese Academy of Sciences, Beijing 100190, China 2 Brainnetome Center, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China 3 CAS Center for Excellence in Brain Science and Intelligence Technology, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China 4 School of Health and Life Sciences, University of Health and Rehabilitation Sciences, Qingdao 266000, China 5 Institute of Neuroscience and Medicine (INM-7: Brain and行为。研究,哥本哈根大学医院-Amager和Hvidovre,2650 Hvidovre,丹麦9铅联系 *通信:chucongying@gmail.com(C.C.),lingzhong.fan@ia.ac.cn(l.f.)https://doi.org/10.1016/j.celrep.2024.113770

4D打印多键搭配的高内相乳液以组装热响应形状 - 记忆层次分层大孔支架
由于它们在生物制造,吸附,催化和能量转化应用方面具有巨大的潜力,因此人们对制造4D印刷的层次多孔结构从分子水平到宏观尺寸有很大的关注。为此,对于设计创新的构造,必须了解4D打印中智能材料的结构功能关系,而这些构建体不限于任何特定的自由度。在这里,我们报告了通过3D打印pickering型臀部的3D打印,以制造热响应性大量聚合聚合物高的内相乳液(Poly-hipes)。基于水的皮带油的油墨含有甲基纤维素/kappa-carrageenan混合物(非交叉链接)作为连续相,该相通过纤维素纳米晶体和纤维素纳米纤维的混合胶体稳定。基于皮克希的墨水显示出具有出色粘弹性界面特性的非线性和时间依赖性振动响应。在基于热融化的基于挤出的印刷过程中,Pickering-iphes的原位交联很容易地制造出多挑战型,这产生了一系列3D打印的热反应层次层次MAC ROPOLOPORFORFURES。4D打印的对象提出了高度相互连接的敞开多孔结构,该结构本质上具有热响应性。此外,这些4D结构显示出高机械强度,并具有出色的自我恢复性能。我们的结果提供了通过调节乳液配方在不同温度下开发具有形状记忆特征的热响应MAC rop的前景。
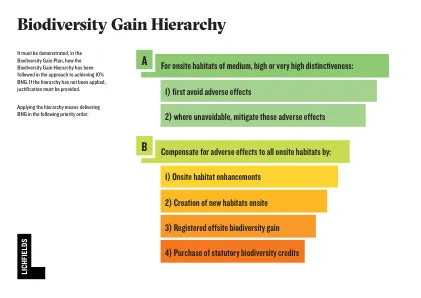
生物多样性获得层次结构
必须在生物多样性收益计划中证明生物多样性增益层次结构在实现10%BNG的方法中如何遵循。如果尚未应用层次结构,则必须提供理由。应用层次结构意味着按以下优先顺序交付BNG:

层次运动计划和离线稳健模型的自动驾驶预测控制
摘要 - 在恶劣条件下在复杂情况下驾驶车辆是自动驾驶汽车(AV)的最大挑战。为了解决这个问题,我们在复杂的场景中使用前主动转向系统提出了层次运动计划和稳健的控制策略,并在各种湿滑的道路粘附系数中,同时考虑车辆不确定的参数。通过智能驾驶员模型(IDM)考虑并以车辆跟随模型的形式考虑人类车辆(HVS)的行为(HVS)。然后,在上层中,运动计划者首先使用人工电位场(APF)算法来生成最佳轨迹,例如,路标,边界和静态/动态障碍物,例如道路标记,边界和静态/动态障碍。为了在下层跟踪生成的最佳trajectory,通过应用线性矩阵不等式(LMI)优化方法,使用线性参数变化(LPV)系统来实现离线约束的输出反馈鲁棒模型预测性控制(RMPC),以确保对模型参数的鲁棒性不适合模型不限制。更重要的是,通过增强系统模型,我们提出的方法称为离线RMPC,与三种现有的RMPC方法相比,具有出色的效率,例如,偏置式挡板offline RMPC,在线rmpc,在线rmpc和离线rmpc无需增强模型(离线rmpc w/o am),在不线rmpc w/o am)(均改进了计算时间),并改进了计算时间和添加时间。

脑动力学中的功能层次结构,其特征是雪貂皮层中的信号可逆性
大脑信号不可逆性已被证明是研究神经动力学的一种有前途的方法。然而,尚不完全了解与皮质层次结构的关系以及不同电生理特征的影响。在这项研究中,我们使用植入雪貂中的自定义微皮层图(μECOG)阵列记录了自发行为(包括清醒和睡眠期)的本地田间电位(LFP)。与人类相比,在整个睡眠效果周期中,雪貂在每个状态中的时间保持较小。我们部署了各种指标,以衡量不同行为状态的复杂性水平。尤其是,大脑不可逆性是由信号的箭头捕获的非平衡动态的标志,揭示了雪貂皮层的分层组织。我们发现在三种不同的大脑状态(主动清醒,安静的清醒和深度睡眠)的不可逆性和功能性层次结构的不同签名,与另一个相比,在深度睡眠阶段的不可逆性水平较低。不可逆性也使我们能够在此过程中解散不同皮质区域和频带的影响,显示顶叶皮层和theta带的占主导地位。此外,当通过隐藏的马尔可夫模型检查嵌入式动态时,深度睡眠阶段被发现具有较低的开关速率和较低的熵产生。这些结果表明组织中的功能层次结构可以通过热力学特征和信息理论指标来揭示。

由人类双流启发的假肢手的半自治层次控制框架
摘要:假肢手的常规使用显着增强了amputees的日常生活,但它经常引入认知载荷并降低反应速度。为了解决这个问题,我们引入了一个可穿戴的半自治层次控制框架,该框架是为截肢者量身定制的。从人类的视觉处理流中汲取灵感,将完全自主的仿生控制器集成到假肢手部控制系统中,以折断认知负担,并以人类在循环(HIL)控制方法中进行补充。在腹流阶段,控制器整合了用户手眼协调和生物本能中的多模式信息,以分析用户的运动意图并操纵视图域中的原始开关。通过HIL控制策略实现了向背流阶段的过渡,将精确的力控制与假肢的传感器和用户的肌电图(EMG)信号相结合。实验结果证明了所提出的界面的有效性。我们的方法提出了一种更有效的机器人控制系统与人之间相互作用的方法。