XiaoMi-AI文件搜索系统
World File Search System工作量

增强工作量驱动t驱动T型管组件在开发心肌细胞中
这是根据Creative Commons Attribution非商业许可条款的开放式访问文章,该许可允许在任何媒介中使用,分发和复制,前提是适当地引用了原始工作,并且不用于商业目的。相应的作者O. Manfra和W. E. Louch:奥斯陆大学医院和奥斯陆大学实验医学研究所,Ullevål,PB 4956 Nydalen,NO-0424,NO-0424,挪威奥斯陆。ornella.manfra@medisin.uio.no,w.e.louch@medisin.uio.no。 作者贡献动物工作,组织收获和蜂窝成像是在俄勒冈州健康与科学大学骑士心血管研究所的发展健康中心进行的。 图像和分子分析是在奥斯陆大学医院和奥斯陆大学实验医学研究所进行的。 o.m.,G.D.G.,K.L.T。和W.E.L. 负责研究的概念和设计。 S.L.,S.S.J.,G.D.G.和K.L.T. 有组织并进行了动物手术以及收获的组织。 S.L. 孤立的心肌细胞和O.M. 进行了细胞成像研究。 o.m. 和M.F. 执行图像分析。 H.P-D。设计和执行的PCR实验。 o.m. 和W.E.L. 写了所有作者的关键输入的论文。 该研究的资金由G.D.G.,K.L.T.,O.M。和W.E.L.提供。 所有作者都批准了手稿的最终版本。 所有被指定为作者的人都有资格获得作者身份,所有有资格获得作者资格的人都被列出。ornella.manfra@medisin.uio.no,w.e.louch@medisin.uio.no。作者贡献动物工作,组织收获和蜂窝成像是在俄勒冈州健康与科学大学骑士心血管研究所的发展健康中心进行的。图像和分子分析是在奥斯陆大学医院和奥斯陆大学实验医学研究所进行的。o.m.,G.D.G.,K.L.T。和W.E.L.负责研究的概念和设计。S.L.,S.S.J.,G.D.G.和K.L.T. 有组织并进行了动物手术以及收获的组织。 S.L. 孤立的心肌细胞和O.M. 进行了细胞成像研究。 o.m. 和M.F. 执行图像分析。 H.P-D。设计和执行的PCR实验。 o.m. 和W.E.L. 写了所有作者的关键输入的论文。 该研究的资金由G.D.G.,K.L.T.,O.M。和W.E.L.提供。 所有作者都批准了手稿的最终版本。 所有被指定为作者的人都有资格获得作者身份,所有有资格获得作者资格的人都被列出。S.L.,S.S.J.,G.D.G.和K.L.T.有组织并进行了动物手术以及收获的组织。S.L. 孤立的心肌细胞和O.M. 进行了细胞成像研究。 o.m. 和M.F. 执行图像分析。 H.P-D。设计和执行的PCR实验。 o.m. 和W.E.L. 写了所有作者的关键输入的论文。 该研究的资金由G.D.G.,K.L.T.,O.M。和W.E.L.提供。 所有作者都批准了手稿的最终版本。 所有被指定为作者的人都有资格获得作者身份,所有有资格获得作者资格的人都被列出。S.L.孤立的心肌细胞和O.M.进行了细胞成像研究。o.m.和M.F.执行图像分析。H.P-D。设计和执行的PCR实验。 o.m. 和W.E.L. 写了所有作者的关键输入的论文。 该研究的资金由G.D.G.,K.L.T.,O.M。和W.E.L.提供。 所有作者都批准了手稿的最终版本。 所有被指定为作者的人都有资格获得作者身份,所有有资格获得作者资格的人都被列出。H.P-D。设计和执行的PCR实验。o.m.和W.E.L.写了所有作者的关键输入的论文。该研究的资金由G.D.G.,K.L.T.,O.M。和W.E.L.提供。所有作者都批准了手稿的最终版本。所有被指定为作者的人都有资格获得作者身份,所有有资格获得作者资格的人都被列出。所有作者都同意对工作的各个方面负责,以确保与工作的准确性或完整性相关的问题得到适当研究和解决。
比较基于EMG的假体设备研究中认知工作量评估技术
摘要 - 先前的研究发现,基于肌电图(EMG)的假体设备可提供更高的握力,提高功能性能,并且比常规假体具有更大的运动范围。但是,认知工作量(CW)仍然是可能对设备的可用性和满意度产生负面影响的问题之一。为了在设计周期的早期评估假肢设备的CW,首先需要选择最合适的措施。因此,这项研究的目标是:(1)回顾以前基于EMG的假体设备评估中使用的CW测量技术; (2)提供指南以选择最合适的测量技术。发现的结果表明,认知绩效模型(CPM),主观措施,任务绩效指标和某些生理指标在检测假体设备配置之间的CW差异方面很敏感,因此可能是对这些技术的可用性评估的有用工具。但是,为了降低侵入性和成本,与生理测量相比,主观工作量度量,任务绩效和CPM等方法更有益。本研究提出的指南可能有益于选择最合适的CW测量技术,以提高灵敏度和准确性并降低侵入性和成本。

肌电假手的人工感知和半自主控制可提高性能并减少工作量
摘要 — 由于肌电人机界面的局限性,对具有多关节腕部/手部的上肢假肢进行灵巧控制仍然是一个挑战。多种因素限制了这些界面的整体性能和可用性,例如需要按顺序而不是同时控制自由度,以及从虚弱或疲劳的肌肉中解读用户意图的不准确性。在本文中,我们开发了一种新型人机界面,该界面赋予肌电假肢 (MYO) 人工感知、用户意图估计和智能控制 (MYO-PACE),以在准备假肢进行抓取时持续为用户提供自动化支持。我们在实验室和临床测试中将 MYO-PACE 与最先进的肌电控制 (模式识别) 进行了比较。为此,八名健全人和两名截肢者进行了一项标准临床测试,该测试由一系列操纵任务(SHAP 测试的一部分)以及在杂乱场景中更复杂的转移任务序列组成。在所有测试中,受试者不仅使用 MYO-PACE 更快地完成了试验,而且还实现了
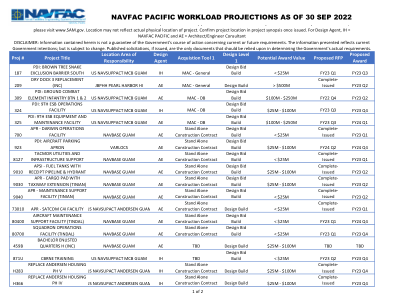
截至 2022 年 9 月 30 日的美国海军工程司令部太平洋工作量预测
pj , g , y pp yy ,请访问 www.SAM.gov。位置可能不反映项目的实际物理位置。项目概要发布后,请在其中确认项目位置。设计代理,IH = NAVFAC PACIFIC 和 AE = 建筑师/工程顾问免责声明:此处包含的信息不能保证政府针对当前或未来要求的行动方针。所提供的信息反映了当前政府的意图;但可能会发生变化。发布的招标书(如果发布)是确定政府实际要求时应依赖的唯一文件。

人类绩效建模:分析有人-无人团队对飞行员工作量和任务绩效的影响
本论文中表达的观点均为作者的观点,不反映美国空军、国防部或美国政府的官方政策或立场。本材料被宣布为美国政府作品,不受美国版权保护。

预测使用外骨骼进行建筑工作的心理工作量:一种深度学习方法
摘要:外骨骼正在引起人们的注意,作为解决建筑行业背部受伤的潜在解决方案。但是,在施工中使用主动支持外骨骼会引发意想不到的后果,这可能会增加工人的心理工作量。长期增加心理工作可以影响工人的福祉和生产力。预测外骨骼使用期间的心理工作量可以为减轻触发因素提供依据。这项研究研究了两个机器学习框架,用于使用主动的背支持外骨骼进行施工工作来预测精神工作量。实验实验,其中脑电图(EEG)的数据是从戴着主动背支架外骨骼的参与者那里收集的,以执行地板任务。EEG数据接受了预处理,包括频带滤波,缺口过滤和独立的组件分析,以删除工件并确保数据质量。基于回归的长期记忆(LSTM)网络和卷积神经网络和LSTM的混合模型进行了培训,以预测处理后的脑电图数据的未来时间步骤。使用均方根误差和R平方评估网络的性能。平均均方根误差为0.162,R平方为0.939,表明LSTM网络在所有EEG通道上具有更好的预测能力。实际心理工作量和预测的心理工作量之间的比较结果还表明,实际心理工作负载中约有75%的差异是在预测的心理工作中捕获的。这项研究增强了对在建筑工作中使用外骨骼的意外后果的理解。结果强调了各种卷积神经网络方法在识别关键EEG数据特征的有效性,并为未来应用中的算法选择提供了指南。此外,该研究还确定了在使用外骨骼期间评估心理工作量的最合适的大脑通道,从而有助于EEG设备的开发,以优化成本效益,解释力和最少的通道。这项研究为利益相关者提供了宝贵的见解,以便在使用外骨骼并发现缓解机会的同时了解心理工作的影响。

首届跨会话工作量估计被动式脑机接口竞赛回顾
和许多研究领域的情况一样,脑机接口 (BCI) 领域数据共享仍然很少,尤其是在被动 BCI 领域——即基于从脑部测量估计的用户心理状态实现隐性交互或任务调整的系统。此外,该领域的研究目前面临一个重大挑战,即解决脑信号变异性,例如跨会话变异性。因此,为了在该领域发展良好的研究实践,并使整个社区能够联合起来进行跨会话估计,我们创建了第一个关于跨会话工作量估计的被动脑机接口竞赛。本次竞赛是第三届国际神经人体工程学会议的一部分。数据是从 15 名志愿者(6 名女性;平均 25 岁)获得的脑电图记录,他们进行了 3 次多属性任务组合 II (MATB-II) 测试,每次测试间隔 7 天,每场测试有 3 个难度级别(伪随机顺序)。数据(训练和测试集)与 Matlab 和 Python 玩具代码一起在 Zenodo 上公开提供(https://doi.org/10.5281/zenodo.5055046)。到目前为止,该数据库的下载次数已超过 900 次(2021 年 12 月 10 日所有版本的独立下载次数:911)。来自 3 大洲的 11 个团队(31 名参与者)提交了他们的作品。表现最好的处理流程包括基于黎曼几何的方法。虽然结果优于调整后的随机水平(对于 3 类分类问题,α 为 0.05,结果为 38%),但准确率仍然低于 60%。这些结果清楚地强调了跨会话估计的真正挑战。此外,它们再次证实了黎曼方法对 BCI 的稳健性和有效性。相反,三分之一的方法(4 个团队)基于深度学习获得了随机水平结果。与传统方法相比,这些方法在本次比赛中没有表现出更优的结果,这可能是由于严重的过度拟合。然而,这次比赛是共同努力解决 BCI 变异性并促进包括可重复性在内的良好研究实践的第一步。
首届跨会话工作量估计被动式脑机接口竞赛回顾
和许多研究领域的情况一样,脑机接口 (BCI) 领域数据共享仍然很少,尤其是在被动 BCI 领域——即基于从脑部测量估计的用户心理状态实现隐性交互或任务调整的系统。此外,该领域的研究目前面临一个重大挑战,即解决脑信号变异性,例如跨会话变异性。因此,为了在该领域发展良好的研究实践,并使整个社区能够联合起来进行跨会话估计,我们创建了第一个关于跨会话工作量估计的被动脑机接口竞赛。本次竞赛是第三届国际神经人体工程学会议的一部分。数据是从 15 名志愿者(6 名女性;平均 25 岁)获得的脑电图记录,他们进行了 3 次多属性任务组合 II (MATB-II) 测试,每次测试间隔 7 天,每场测试有 3 个难度级别(伪随机顺序)。数据(训练和测试集)与 Matlab 和 Python 玩具代码一起在 Zenodo 上公开提供(https://doi.org/10.5281/zenodo.5055046)。到目前为止,该数据库的下载次数已超过 900 次(2021 年 12 月 10 日所有版本的独立下载次数:911)。来自 3 大洲的 11 个团队(31 名参与者)提交了他们的作品。表现最好的处理流程包括基于黎曼几何的方法。虽然结果优于调整后的随机水平(对于 3 类分类问题,α 为 0.05,结果为 38%),但准确率仍然低于 60%。这些结果清楚地强调了跨会话估计的真正挑战。此外,它们再次证实了黎曼方法对 BCI 的稳健性和有效性。相反,三分之一的方法(4 个团队)基于深度学习获得了随机水平结果。与传统方法相比,这些方法在本次比赛中没有表现出更优的结果,这可能是由于严重的过度拟合。然而,这次比赛是共同努力解决 BCI 变异性并促进包括可重复性在内的良好研究实践的第一步。
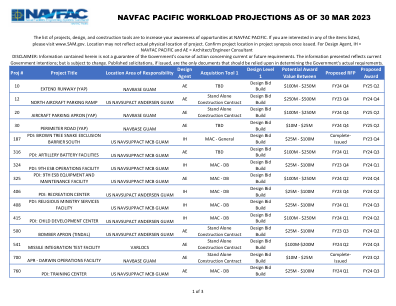
截至 2023 年 3 月 30 日的美国海军工程司令部太平洋工作量预测
项目、设计和施工工具列表旨在提高您对 NAVFAC PACIFIC 机会的认识。如果您对列出的任何项目感兴趣,请访问 www.SAM.gov。位置可能不反映项目的实际物理位置。项目概要发布后,请在其中确认项目位置。对于设计代理,IH = NAVFAC PACIFIC 和 AE = 建筑师/工程师顾问免责声明:此处包含的信息不能保证政府针对当前或未来要求的行动方针。所提供的信息反映了当前政府的意图;但可能会发生变化。发布的招标(如果发布)是确定政府实际要求时应依赖的唯一文件。

截至 2022 年 9 月 30 日的美国海军工程司令部太平洋工作量预测
pj , g , y pp yy ,请访问 www.SAM.gov。位置可能不反映项目的实际物理位置。项目概要发布后,请在其中确认项目位置。设计代理,IH = NAVFAC PACIFIC 和 AE = 建筑师/工程顾问免责声明:此处包含的信息不能保证政府针对当前或未来要求的行动方针。所提供的信息反映了当前政府的意图;但可能会发生变化。发布的招标书(如果发布)是确定政府实际要求时应依赖的唯一文件。