XiaoMi-AI文件搜索系统
World File Search System平滑的

Android智能手机单点定位的开源优化方法
摘要如今,芯片规模的全球导航卫星系统(GNSS)接收器在智能手机中无处不在。在智能手机GNSS接收器中,实施最小的(LS)或Kalman滤波器(KF)以估算位置。旨在提高智能手机GNSS位置精度,我们建议使用比传统方法(即LS和KF)更多的历史信息进行平滑的方法。更多的过去状态被视为未知数,并且构建了成本函数以优化这些状态。使用Google的开源智能手机数据集用于测试提出的方法。实验结果表明,所提出的方法在位置误差中的其他常规方法优于其他常规方法。此外,我们打开源代码。我们期望在智能手机GNSS位置平滑应用程序中实现的优化方法可以是一个说明性的示例,可以清楚地引入这种优化方法和其实现的参考,这可能会激发GNSS中其他一些有意义且令人兴奋的应用程序。
气动弹性运载火箭的晃动观测器设计
本文重点介绍滑模观测器的设计,以估计晃动质量的位置和速度状态。这些状态随后用作姿态控制器的反馈信号。简单的比例微分 (PD) 刚体控制器无法安全地执行姿态命令,否则会遇到稳定性问题,即使在稳定状态下,非零晃动质量位置也会导致旋转角度抖动。通过晃动状态反馈,即使是非最优 PD 控制器也会在有限的执行器活动下表现出平滑的响应。然而,观测器的晃动模型参数的轻微不确定性会对控制器性能产生负面影响,从而增加液体的振幅和振荡行为。需要额外的观测器来估计正确的参数值。更强大的增量非线性动态逆控制器可以改善控制器响应,但需要进一步开发,例如,在反馈回路中加入陷波滤波器。
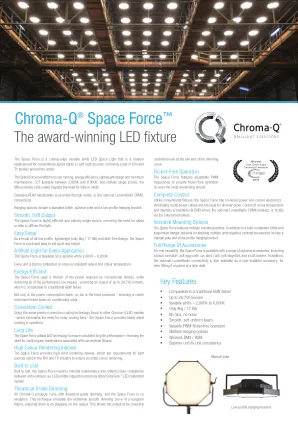
Chroma-Q® Space Force™ - 创新照明
不仅功耗更低,产生的热量也更低 - 确保环境更凉爽,空调成本更低。 对流冷却 使用与其他 Chroma-Q LED 型号相同的成熟对流冷却技术 - 无需嘈杂的冷却风扇 - 太空部队可在运行时完全静音。 长寿命 太空部队利用 LED 技术确保一致的长寿命性能 - 无需与传统灯具相关的昂贵的定期维护。 高显色指数 太空部队提供高显色指数,这是电影和电视行业用于确保准确显色的光源的要求。 经久耐用 太空部队经久耐用,几乎不需要维护,并且由于我们的 LED 发射器检查和专有的 ColorSure ™ LED 校准系统,可保持设备之间的色彩一致性。 剧院级调光 所有 Chroma-Q 产品都具有剧院级调光功能,太空部队也不例外。该技术模拟了钨丝灯极其平滑的调光曲线,确保输出没有阶跃。这使得输出顺利

监督学习中的稀疏活动和稀疏连接
稀疏性是一种有用的正则化器,可用于各种应用,尤其是在神经网络中。本文提出了一种针对分类任务的模型,其中稀疏活动和稀疏连接用于增强分类能力。实现此目标的工具是稀疏性强制投影算子,它可以为任何给定向量找到具有预定义稀疏性的最接近向量。在本文的理论部分,开发了这种投影的综合理论。总而言之,结果表明投影几乎在任何地方都是可微的,因此可以实现为平滑的神经元传递函数。因此,可以使用基于梯度的方法端到端调整整个模型。在 MNIST 手写数字数据库上进行的实验表明,稀疏活动或稀疏连接可以提高分类性能。通过两者的结合,与传统的非稀疏方法相比,性能可以显著提高。关键词:监督学习、稀疏投影、稀疏活动、稀疏连接

舌头驱动系统操作电脑
“舌头驱动器”是一种无线、非接触式舌头操作辅助技术,专为严重残疾的人开发,用于使用计算机,并仅使用舌头控制轮椅和其他设备等环境。舌头被认为是严重残疾人操作辅助设备的绝佳附属物。舌头驱动器由固定在舌头上的霍尔效应磁传感器阵列组成。传感器通过无线链路传输信号,并对其进行处理以控制安装在牙齿外侧的牙齿保持器上,以测量由米粒大小的小型永久微型磁铁产生的磁场,该磁铁通过植入、穿孔或粘合剂附着在个人的舌头上。这项技术允许残疾人在移动计算机鼠标或电动轮椅时使用舌头。该技术的主要优势是可以通过处理传感器输出的组合来捕捉各种各样的舌头运动。这将为用户提供平滑的比例控制,而不是基于大多数现有技术的开/关控制。

the the-comphack-cancer-ncr- ...
[图片来源:胃]胃位于食道和小肠之间。它分泌称为蛋白酶和浓酸的蛋白质消化酶,以帮助食物消化。食物通过平滑的肌肉扭曲通过食道蠕动到达胃。部分消化的食物(Chyme)被转发到小肠。胃癌胃癌,也称为胃癌,是一种从胃开始的癌症。。然后可以形成肿瘤。恶性肿瘤也称为癌症。胃癌不应与腹部可能发生的其他癌症相混淆,例如结肠癌(大肠),肝脏,胰腺或小肠,因为这些癌症可能具有不同的症状,不同的外观和不同的治疗方法。胃癌倾向于多年来缓慢发展。在出现真正的癌症之前,胃内(粘膜)经常发生癌前变化。这些早期变化很少引起症状,并且常常未被发现。从胃的不同部分开始的癌症可能会导致不同的症状,并且往往会产生不同的预后。癌症的位置也会影响治疗方案。

COBL扩散:使用控制屏障和Lyapunov功能在动态环境中基于扩散的条件机器人计划
抽象 - 装备自主机器人,能够在人类周围安全有效地导航的能力是迈向实现可信赖的机器人自治的关键一步。但是,在确保动态多机构环境中的安全性的同时生成机器人计划仍然是一个关键挑战。基于最新的工作,以利用深层生成模型在静态环境中进行机器人计划,本文提出了Cobl-Diffusion,这是一种基于扩散的新型安全机器人计划器,用于动态环境。COBL扩散使用控制屏障和Lyapunov函数来指导扩散模型的固定过程,迭代地完善了机器人控制序列以满足安全性和稳定性约束。我们使用两个设置证明了COBL扩散的有效性:合成单位环境和现实世界中的行人数据集。我们的结果表明,COBL扩散会产生平滑的轨迹,使机器人能够到达目标位置,同时保持低碰撞速率,并具有动态障碍。

不同地球物理方法在探测中的分析...
摘要:这项研究涉及四种地球物理方法的应用和分析(电阻率断层扫描,微重力,磁性,M.A.S.W.)用于在受控场地条件下检测隧道。Resistivity断层扫描为目标和近表面地质形成提供了令人满意的信息。偶极偶极子和杆偶极是检测到的空隙的最合适的阵列,尤其是当后来的前向前和逆转测量值时。耗时且费力的微重力方法适用于隧道的描述。先验信息对于微重力数据的反转是必需的。从表面波的多通道分析中得出的伪部分显示了两个地质层,并成像了浅平滑的异质性,归因于地下目标。但是,由于较低的横向分辨率,目标限制并未很好地定义。由于目标和宿主岩之间的磁化敏感性增加,梯度磁方法可以准确地描述隧道。当目标是当代人制造的结构时,通常会满足这种情况。
深入铜焊接使用高功率CW激光器
用24 kW的Trudisk激光器进行了实验,具有1030 nm波长和双核纤维,以及适用于24 kW的扫描仪光纤(此光学的特朗普名称为PFO 33(KF023)(KF023),[Pricking et al(2022)])。BrightlineWeld技术允许在100 µm内芯和400 µm外芯之间自由拆分功率,从而稳定钥匙孔并最大程度地减少溅射形成[Speker等人(2018)]。在此提出的实验中,使用了70%的核心与环比率,从而产生平滑的焊缝。放大倍率为3.2,内芯的焦点直径为320 µm,而外芯的焦点直径为1285 µm,相对于内芯,雷莱基长度为6 mm。使用此设置,工作场也很大,工作距离也很大,最大程度地减少了溅射对保护玻璃的影响,并且内核的斑点大小是焊接的典型特征。

外汇干预理论
我们研究一个真实的小型开放经济体,它有两个关键因素:(1)国内外债券市场的部分分割;(2)货币外部性导致实际汇率在资本流动的影响下过度波动。部分分割意味着,通过干预债券市场,央行可以影响汇率以及国内外债券收益率之间的利差。此类干预使央行能够解决货币外部性问题,但成本也很高,因为外国人可以通过套利交易获利。我们分析了解决这种权衡的最佳干预政策:(1)最佳政策逆风而行,稳定汇率;(2)它涉及平滑的利差,但允许汇率跳跃;(3)它部分依赖于“前瞻性指引”,即使在冲击消退后也会进行非零干预;(4)它需要可信度,因为央行不会在没有承诺的情况下进行干预。最后,我们利用模型的多国扩展,阐明了大规模干预对全球造成的后果。我们发现,如果任其发展,各国会过度积累储备,从而降低福利,并导致全球利率低得无效率。