XiaoMi-AI文件搜索系统
World File Search System平衡的

探索爱好是工作与生活平衡的关键组成部分...
Dedication ......................................................................................................................... 3

不同大脑区域线粒体能量平衡的变化
本文已接受出版并经过完整的同行评审,但尚未经过文字编辑、排版、分页和校对过程,这可能会导致此版本与记录版本之间存在差异。请引用本文 doi:10.1111/JNC.15239
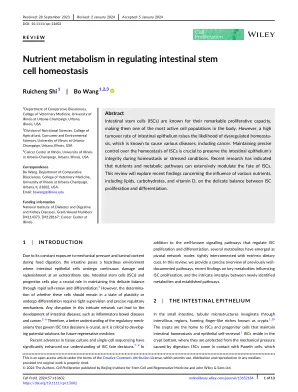
调节肠道干细胞体内平衡的营养代谢
图2饮食模式调节肠道干细胞(ISC)功能。(a)禁食,快速恢复和卡路里限制。禁食通过启动脂肪酸氧化(FAO)程序来增强ISC功能,并取决于肉碱棕榈酰转移酶1A(CPT1A)。其他调节器(例如PRDM16和HNF4A/G)也通过调节粮农组织来调节ISC。快速恢复后刺激MTORC1并通过多胺代谢程序激活蛋白质合成。结果,ISC增殖和肿瘤发生都升高。在卡路里限制期(CR)期间,由于雷帕霉素复合物1(MTORC1)的机理靶标降低,paneth细胞旁分泌因子循环ADP核糖(CADPR)。CADPR进入ISC,并通过SIRT/MTORC1-S6K1信号传导促进ISC和Paneth细胞的增殖。CR还增强了储备ISC中的DNA损伤性,从而保留了再生能力。(b)高脂,高脂/高糖和生酮饮食。高脂饮食(HFD)通过过氧化物酶体增殖物 - 活化受体δ(PPARδ)和LXR/FXR信号传导激活β-蛋白酶靶基因,从而促进ISC增殖。此外,PPARδ使祖细胞能够恢复干细胞特征,从而促进肿瘤发生。高脂/高糖饮食(HFHSD)通过激活固醇调节性元件结合蛋白1(SREBP1,用于脂肪酸合成),PPARγ信号传导和胰岛素受体-FR-FR-FR-AKT途径来诱导粘膜变化和肠道疾病。酮体衍生自生酮饮食(KTD)或禁食会影响ISC茎和通过3-羟基-3-甲基戊二核酸COA合成酶2(HMGCS2)-Class-Class-Class 1组蛋白脱乙酰基酶(HDAC) - NOTCH信号的分化。

利用工业机器工作负载平衡的约束优化
有效的生产计划是基于约束的优化技术的重要应用领域。问题域(例如流程和工作店计划)是广泛的研究目标,解决方法从完整和本地搜索到机器学习方法。在本文中,我们设计和比较了基于约束的优化技术,以在建筑物到印刷业务中调度专业制造过程。目标是分配生产设备,以便尽可能及时完成客户订单,同时尊重机器能力并最大程度地减少解决瓶颈所需的额外轮班。为此,我们提供了几种方法,用于将未决的生产任务安排到一个或多个工作日以执行它们。首先,我们提出了一种贪婪的自定义算法,该算法允许快速筛选改变资源需求和可用性的影响。此外,我们利用这种贪婪的解决方案来参数化和温暖整数线性编程(ILP)和约束编程(CP)求解器对相应的问题公式进行的优化。我们的经验评估是基于Kostwein Holding GmbH的生产数据,GmbH是建筑直通业务的全球供应商,因此证明了我们调度方法的工业适用性。我们还提出了一个用户友好的Web界面,用于为基础求解器提供客户订单和设备数据,图形显示计算的时间表,并促进对更改资源需求和可用性的调查,例如,由于更新订单或包括额外的偏移。

要切换还是不切换?平衡的政策转换离线增强学习
强化学习(RL) - 找到最大化所收集的长期累积奖励的操作行为(也称为策略),这是机器学习中最有影响力的机器学习中的最大影响之一。在几个决定性问题中,人们面临政策转换的可能性(从车道政策变为新政策),这会损害不容易忽略的成本,而在决定中,人们可以使用历史数据,而没有可用的数据,而无需进行进一步的在线互动。尽管这是最重要的,但据我们所知,这很重要,但几乎没有努力解决以一种灵活和原则性的方式解决收益和转换成本之间的关键问题。利用最佳运输领域的思想,我们将系统转换的系统研究局限于局部的RL。我们建立了基本属性,并为拟议的新型切换公式设计了净活动界算法。数字实验证明了我们的方法在体育馆的多个机器人控制基准和SUMO-RL的光照控制上的效率。

改变触觉反馈收益对平衡的影响由感觉冲突估算
抽象轻轻接触实心物体会减少姿势摇摆。在这里,我们确定人为修改触觉反馈以达到平衡的效果。参与者闭着眼睛站着,轻轻地抓住了一个与身体摇摆同步移动的杂志,以系统地增强或减弱+2至2之间的反馈增益,分别对应于与身体相同或相反方向的运动。这种干预对姿势摇摆有系统的影响,姿势摇摆表现出不对称的U形功能,相对于触觉反馈增益。旋转在零增益周围的最小值,对应于静态对象。摇摆以低于-0.25的收益略有增加,但在+0.25以上的增长下大大增加。在+2时,大约是无接触条件的两倍。手和manipulandum之间的平均相互作用力在整个过程中保持<0.9 n,尽管它在极端增长下略有增加。在最少摇摆条件下,手部力和躯干位置之间的互相关最高,这表明更高质量的触觉反馈与更大的摇摆减少有关。我们使用反馈控制模型成功地复制了摇摆行为,该模型在触觉和本体感受信号之间的差异达到阈值时会减弱触觉反馈信号。我们的发现表明,中枢神经系统可以利用增强的触觉反馈来实现Bal-ance,但只有对自然反馈增益的变化相对较小。在健康的志愿者中,它比静态物体提供了最小的好处。触觉反馈是最佳的。

通过大规模电动汽车充电控制控制电网平衡的机器学习
1。熟悉ČEPS提供的有关电网不平衡的公开数据,以及主管提供的布拉格公共电动汽车充电会话的匿名数据。通过对齐时间表来确保数据集可比较。2。定义一个优化问题,可以通过受控的公共电动汽车充电来最大程度地减少电网失衡。在每个充电会话的完美信息的假设下描述一种最佳控制方法。3。实施最佳控制方法并评估其在最小化整个数据集的电网失衡时的性能。4。提出了基于机器学习的方法,该方法以有限的信息来解决方案,以了解每个充电会话的长度,电池充电状态以及会议期间电网不平衡的开发。评估机器学习模型的性能,并将其结果与最佳解决方案进行比较。5。衡量V2G技术对电网不平衡优化的潜在影响,在这种情况下,车辆可以将能量恢复到电网中,而不是仅像以前的情况一样局限于充电。应用以前使用的相同方法,并比较整个电网不平衡的变化以及机器学习性能。
计算正能量区的年度初级能源平衡的指南
本文档旨在设定一种方法来计算产生比消耗能量更多的地区的年度初级能源平衡。在正能量区的设计和评估过程中,这可能是城市的实用工具。根据几个步骤可以生成年度余额的计算方法。首先,需要确定能源和资源。进行了两项分析后,迭代过程和能量平衡的检查将为该地区提供不同的替代方案。为了评估某个地区的积极程度,该余额是按总或不可再生的一级能源条款进行的,因为它比较了不同类型的能源载体并考虑了该地区限制的收益。计算指南遵循在建立城市项目的初始状态下执行的过程。这是一个为期5年的项目,因此,本文档将继续从观察和学到的内容中演变。该方法基于ISO 52000-1(2017)中定义的建筑物的能源绩效评估。

惯性聚变实验中科学盈亏平衡的能量原理
首次实现了聚变“科学盈亏平衡”(即,目标增益 G 目标为 1,总聚变能量输出 > 激光能量输入)(此处,G 目标 ∼ 1.5)。本文报告了设计变更的物理原理,这些变更导致在国家点火装置上使用激光间接驱动进行首次受控聚变实验,以产生大于 1 的目标增益,并超过了之前根据劳森标准获得的点火所需的条件。成功的关键因素在于减少“滑行时间”(激光脉冲结束和内爆峰值压缩之间的持续时间)和最大化传递到“热点”(聚变燃料的产量产生部分)的内部能量。解释了滑行时间与动能向内能的最大效率转化之间的联系。不对称和流体动力学诱导混合的能量学后果是高产量大半径内爆设计实验和设计策略的一部分。本文展示了不对称和混合如何合并为一个关键关系。结果表明,混合会产生与内爆不对称影响类似的动能成本,从而将点火阈值转移到更高的内爆动能——这一因素通常不包含在广义劳森标准的大多数陈述中,但关键的必要修改显然已经显现出来。
