XiaoMi-AI文件搜索系统
World File Search System形物
从视觉识别地形物理参数
摘要 - 识别周围环境的物理特性对于机器人的运动和导航对于处理非几何危害(例如湿滑和可变形地形)至关重要。机器人在接触之前预测这些极端的物理特性将是很大的好处。但是,从视力中估算环境物理参数仍然是一个开放的挑战。动物可以利用他们先前的经验以及对自己所看到的东西和感受的了解来实现这一目标。在这项工作中,我们为基于视觉的环境参数估计提出了一个跨模式的自我监督学习框架,这为未来的物理范围内的运动和导航铺平了道路。我们弥合了在模拟中训练和识别视力的物理地形参数的现有政策之间的差距。我们建议在模拟中训练物理解码器,以预测多模式输入的摩擦和刚度。训练有素的网络允许以自我监督的方式将现实世界图像标记,以在部署过程中进一步训练视觉网络,这可以密集地预测图像数据的摩擦和僵硬。我们使用四倍的Anymal机器人在模拟和现实世界中验证物理解码器,表现优于现有基线方法。我们表明,我们的视觉网络可以预测室内和室外实验中的物理特性,同时允许快速适应新环境。- 项目页面https://bit.ly/3xo5aa8 -

对爱尔兰圆形物质使用率的批判性分析(...
作者要感谢项目指导委员会的成员,即夏洛特·斯坦珀(EMR Group),帕特里克·巴雷特(Patrick Barrett),帕特里克·巴雷特(Patrick Barrett)(农业,食品和海军陆战队),玛丽·史密斯(CSO),肖恩·科尔根(欧洲环境局),保罗·巴特勒(Enterprise Ireland Ireland)(Enterprise Ireland)和Kevin Lydon(Epa)。我们还感谢EPA研究项目经理Dorothy Stewart和Oonagh Monahan,以及其他顾问的投入:南部地区废物管理办公室的Pauline McDonogh和Ursula Ahern,爱尔兰绿色建筑委员会的Rachel Loughrey和Circuléire的Geraldine Brennan。

从视觉识别地形物理参数
摘要 - 识别周围环境的物理特性对于机器人的运动和导航对于处理非几何危害(例如湿滑和可变形地形)至关重要。机器人在接触之前预测这些极端的物理特性将是很大的好处。但是,从视力中估算环境物理参数仍然是一个开放的挑战。动物可以利用他们先前的经验以及对自己所看到的东西和感受的了解来实现这一目标。在这项工作中,我们为基于视觉的环境参数估计提出了一个跨模式的自我监督学习框架,这为未来的物理范围内的运动和导航铺平了道路。我们弥合了在模拟中训练和识别视力的物理地形参数的现有政策之间的差距。我们建议在模拟中训练物理解码器,以预测多模式输入的摩擦和刚度。训练有素的网络允许以自我监督的方式将现实世界图像标记,以在部署过程中进一步训练视觉网络,这可以密集地预测图像数据的摩擦和僵硬。我们使用四倍的Anymal机器人在模拟和现实世界中验证物理解码器,表现优于现有基线方法。我们表明,我们的视觉网络可以预测室内和室外实验中的物理特性,同时允许快速适应新环境。- 项目页面https://bit.ly/3xo5aa8 -

运动原始扩散:学习可变形物体的轻柔机器人操纵
摘要 - 机器人辅助手术(RAS)中的policy学习缺乏数据效率和多功能方法,这些方法表现出对于精致的手术干预的所需运动质量。为此,我们介绍了运动原始扩散(MPD),这是一种在RAS中模仿学习的新方法(IL),重点是轻柔地操纵可变形物体。该方法结合了基于扩散的模仿学习(DIL)的多功能性与概率动态运动原始基原始(PODMP)的高质量运动产生能力的多功能性。这种组合启动MPD可以轻柔地操纵可变形物体,同时保持数据效率对于稀缺的RAS应用至关重要。我们在状态和图像观察中评估了各种模拟和现实世界机器人任务的MPD。MPD在成功率,运动质量和数据效率方面优于最先进的DIL方法。项目页面:scheiklp.github.io/movement-promistive-diffusion

可持续变形物质:设计和工程实践
变形物质会根据外界刺激而改变形状和性质,这种物质在材料科学、机器人技术、生物医学工程、可穿戴设备、建筑和设计领域引起了人们的极大兴趣。随着功能的进步,人们越来越关注变形物质在其生命周期内对环境的影响。变形物质的独特制造和使用方式意味着,现有的一般实体产品的可持续设计框架和原则可能不直接适用。例如,制造变形物质通常需要设计和预测材料随时间的行为,而使用用变形物质制造的设备通常需要利用可再生能源和自我重构,这带来了独特的可持续性机遇和挑战。本研究反映并总结了该领域在变形物质的可持续制造、运输、使用和报废处理方面的实践。“可持续变形物质”(SMM)一词的诞生表明,可持续性意识因素可以成为变形物质不可或缺的组成部分。此外,还提出了应用可持续性意识因素来增强现有的变形物质设计流程的方法,并且需要更多的定量和算法级别的开发才能将这些因素严格地应用于设计过程。
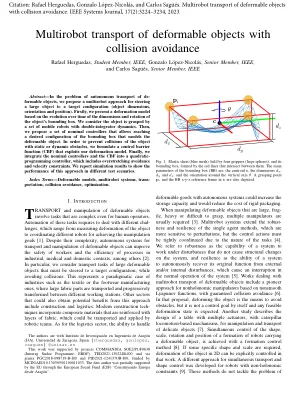
避免碰撞的可变形物体的多动物传输
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。