机构名称:
¥ 1.0
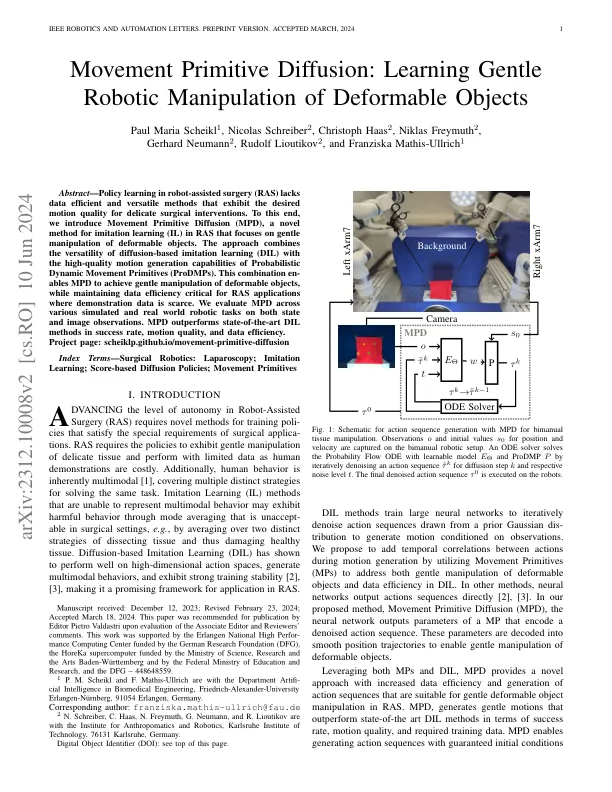
摘要 - 机器人辅助手术(RAS)中的policy学习缺乏数据效率和多功能方法,这些方法表现出对于精致的手术干预的所需运动质量。为此,我们介绍了运动原始扩散(MPD),这是一种在RAS中模仿学习的新方法(IL),重点是轻柔地操纵可变形物体。该方法结合了基于扩散的模仿学习(DIL)的多功能性与概率动态运动原始基原始(PODMP)的高质量运动产生能力的多功能性。这种组合启动MPD可以轻柔地操纵可变形物体,同时保持数据效率对于稀缺的RAS应用至关重要。我们在状态和图像观察中评估了各种模拟和现实世界机器人任务的MPD。MPD在成功率,运动质量和数据效率方面优于最先进的DIL方法。项目页面:scheiklp.github.io/movement-promistive-diffusion
运动原始扩散:学习可变形物体的轻柔机器人操纵
主要关键词



相关文件推荐