机构名称:
¥ 1.0
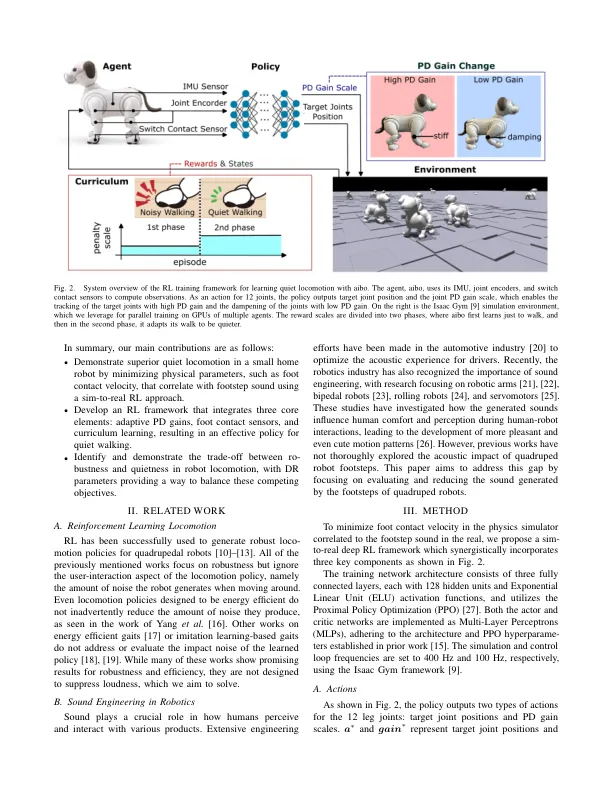
摘要 - 随着家庭机器人的牵引力,机器人被融入家庭中,提供陪伴和援助。四倍的机器人,尤其是那些类似狗的机器人,已经成为传统宠物的流行替代品。但是,用户反馈重点介绍了这些机器人在家里行走时产生的噪音的担忧,尤其是大声的脚步声。为了解决这个问题,我们提出了一种基于SIM的基础增强学习(RL)方法,以最大程度地降低与脚步声高度相关的脚接触速度。我们的框架包含了三个关键要素:学习不同的PD增益,以积极抑制和加强每个关节,使用脚接触传感器,并采用课程学习来逐渐在脚接触速度上执行惩罚。实验表明,与RL基线和精心手工制作的Sony商业控制器相比,我们学到的政策实现了卓越的安静。此外,还显示了稳健性和安静之间的权衡。这项研究有助于在家庭环境中开发更安静,更用户友好的机器人伴侣。
学习安静的小型家庭机器人
主要关键词


相关文件推荐