机构名称:
¥ 1.0
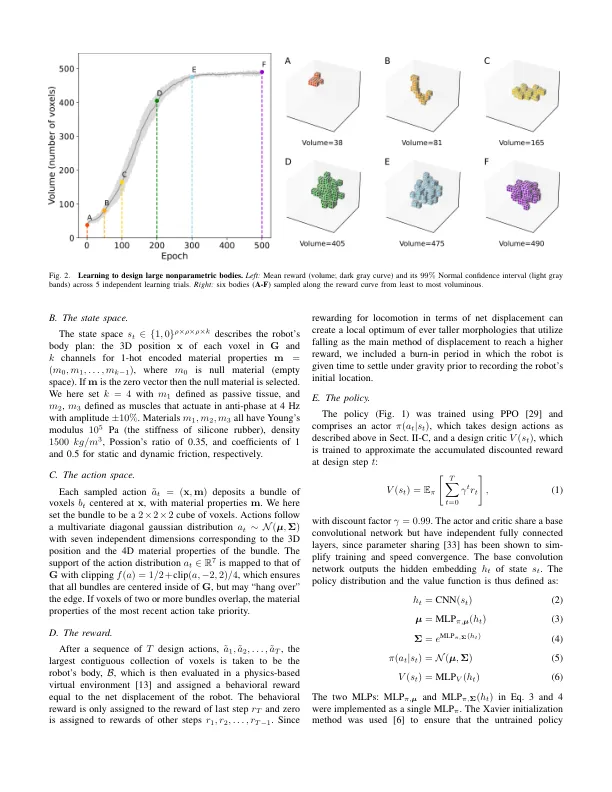
摘要 - 由于动物形态学适应的必要性,越来越多的工作试图扩大机器人训练,以涵盖机器人设计的物理方面。但是,能够优化机器人3D形态的增强学习方法仅限于重新定位或调整预定和静态拓扑属的四肢。在这里,我们显示了设计具有任意外部和内部结构的自由式机器人的策略梯度。这是通过沉积或去除原子构建块的行动来实现的,以形成高级非参数宏观结构,例如附属物,器官和空腔。尽管仅提供了用于开放循环控制的结果,但我们讨论了如何将此方法用于封闭环控制和SIM2REAL将来转移到实体机器。
自由形式机器人设计的强化学习
主要关键词



相关文件推荐