机构名称:
¥ 1.0
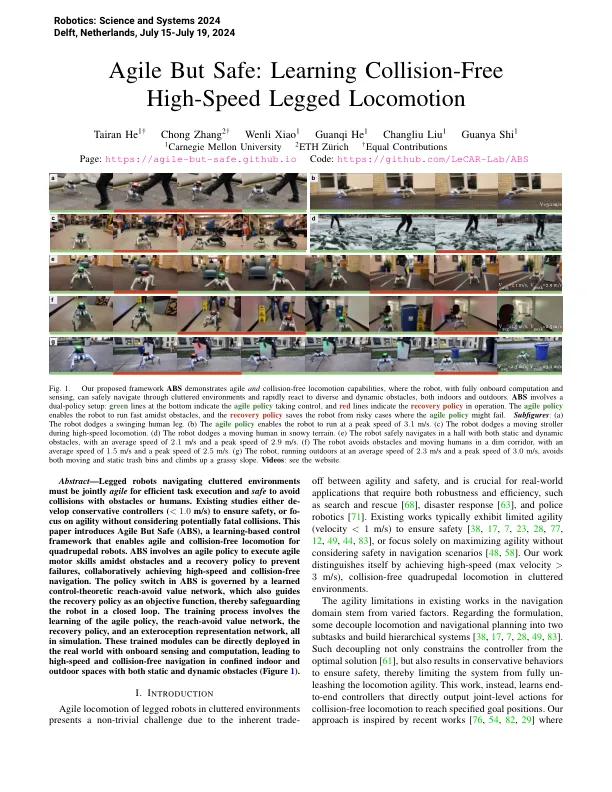
图1。我们提出的框架ABS展示了敏捷和无碰撞的运动能力,其中具有全部计算和感应的机器人可以安全地浏览混乱的环境,并迅速对室内和室外的多样化和动态障碍做出迅速反应。ABS涉及双政策设置:底部的绿线表示敏捷政策的控制,红线表示运行中的恢复策略。敏捷政策使机器人能够在障碍物中快速运行,而恢复政策可以使机器人摆脱敏捷政策可能失败的风险案例。子图:(a)机器人躲避了摇摆的人腿。(b)敏捷政策使机器人能够以3的峰值运行。1 m/s。(c)在高速运动期间,机器人躲避了移动的婴儿车。(d)机器人在白雪皑皑的地形中躲过一个动人的人。(e)机器人安全地在大厅内坐着静态和动态障碍物,平均速度为2。1 m/s,峰速度为2。9 m/s。(f)机器人避免在昏暗的走廊中的障碍和移动人类,平均速度为1。5 m/s,峰值速度为2。5 m/s。 (g)机器人,平均速度为2。 3 m/s,峰值速度为3。 0 m/s,避免移动和静态垃圾箱,并爬上草坡。 视频:请参阅网站。5 m/s。(g)机器人,平均速度为2。3 m/s,峰值速度为3。0 m/s,避免移动和静态垃圾箱,并爬上草坡。视频:请参阅网站。
学习无碰撞的高速腿部运动
主要关键词



相关文件推荐