机构名称:
¥ 1.0
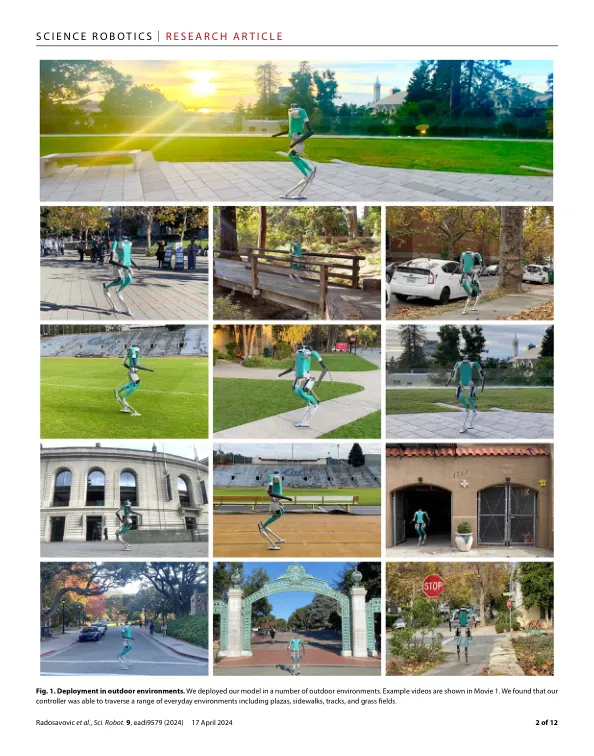
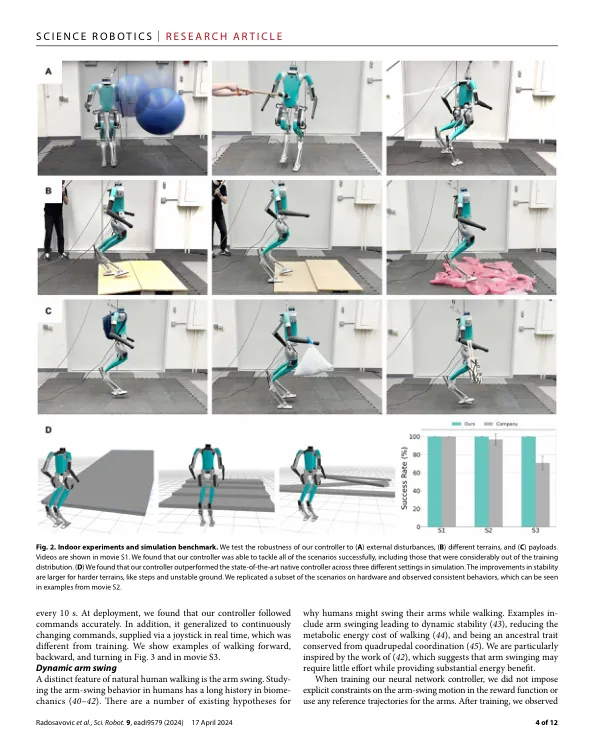
可以在各种环境中自主操作的人形机器人有可能帮助解决工厂中的劳动力短缺,协助老年人在家中并殖民新星球。尽管针对人形机器人的经典控制器在许多设置中都表现出了令人印象深刻的结果,但它们在概括和适应新环境方面具有挑战性。在这里,我们提出了一种完全基于学习的方法,用于实现世界人类人体机构。我们的控制器是一种因果变压器,它将本体感受观察和动作的历史记录为输入,并预测下一个动作。我们假设观察历史记录包含有关世界的有用信息,即强大的变压器模型可以在不更新权重的情况下使用其行为来调整其行为。我们在模拟中的随机环境集合上使用大型模型的大型模型学习训练了我们的模型,并将其部署到了Real-World零拍摄中。我们的控制器可以在各种室外地形上行走,对外部干扰稳健,并且可以在上下文中适应。
现实世界中的人形运动,并进行增强学习
主要关键词


相关文件推荐