
机构名称:
¥ 1.0
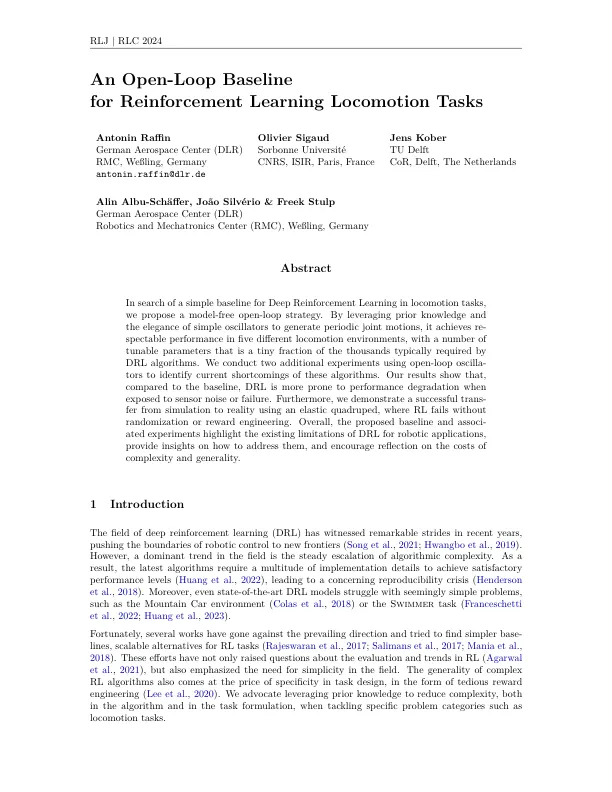
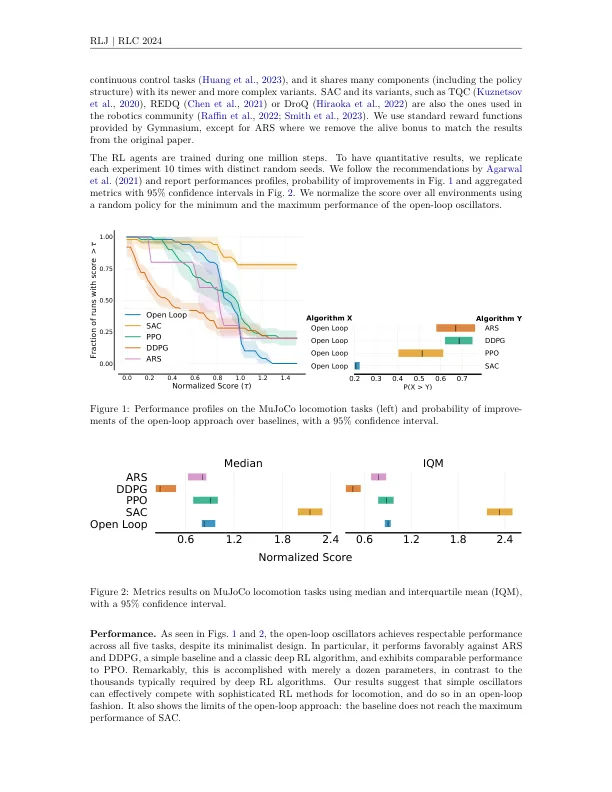
为了寻找运动任务中深度强化学习的简单基线,我们提出了一种无模型的开环策略。通过利用先验知识和简单振荡器的优雅来产生周期性的关节动作,它在五个不同的运动环境中实现了可观的性能,其中许多可调参数是DRL算法通常所需的数千分之一。我们使用开环振荡器进行了两个其他实验,以确定这些算法的当前缺点。我们的结果表明,与基线相比,DRL暴露于传感器噪声或故障时,DRL更容易降解。此外,我们使用弹性四足动物展示了从模拟到现实的成功转移,其中RL在没有随机或奖励工程的情况下失败。总体而言,拟议的基线和协会实验突出了DRL在机器人应用中的现有局限性,提供了有关如何解决它们的见解,并鼓励对复杂性和一般性的成本进行反思。
用于加强学习运动任务的开环基线
主要关键词



相关文件推荐





























