XiaoMi-AI文件搜索系统
World File Search System态势感知
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
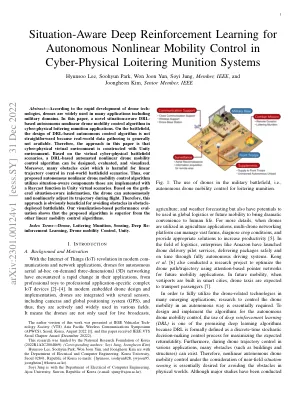
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。根据收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。

WFSWG 野火安全战略内容草案
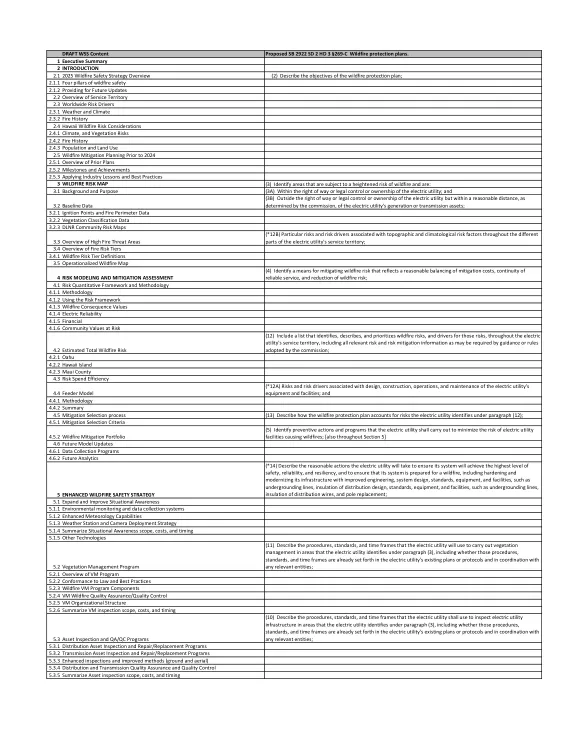
(*14)描述电力公司将采取的合理措施,以确保其系统达到最高水平的安全性、可靠性和弹性,并确保其系统为野火做好准备,包括通过改进工程、系统设计、标准、设备和设施(如地下线路、配电设计、标准、设备和设施,如地下线路、配电电线绝缘和电线杆更换)来加固和现代化其基础设施;5.1 扩大和提高态势感知能力 5.1.1 环境监测和数据收集系统 5.1.2 增强气象能力 5.1.3 气象站和摄像机部署策略 5.1.4 总结态势感知范围、成本和时间 5.1.5 其他技术
(U)对陆军综合视觉增强系统的审计
(U) IVAS 是一种军用护目镜,可在士兵的视线内叠加战术相关的全息信息,以提高杀伤力、机动性和态势感知能力。该系统目前正在开发中。IVAS 将下一代 24/7 态势感知工具和高分辨率数字传感器集成在一个平台上,旨在提高士兵的感知、决策、目标获取和目标交战能力。IVAS 项目经理官员(项目官员)表示,士兵将主要在夜间使用第一版 IVAS,尽管最初的开发是针对白天和夜间使用的。图 1 显示了一名佩戴 IVAS 的士兵。图 2 显示了 IVAS 的各个组件。