XiaoMi-AI文件搜索系统
World File Search System成功率

高档名优绿茶柔性采摘指研制 - 金小俊
传感器与微系统 第 44 卷 殊形状的刀片完成剪切,采摘成功率达 97 . 36 % 。进一步 设计了一种提拉断梗的机械手,舵机带动主动手指和从动 手指转动,将茶梗折弯并拉断,采摘成功率为 74 . 3 % 。华 中农业大学 [ 6 ] 设计了一种结构为曲柄滑块剪切机构的末 端执行器,通过刀片闭合将鲜叶掐断,利用真空装置将剪切 后的茶叶吸入容纳箱。四川农业大学 [ 7 ] 设计了一种可夹 提式采摘茶叶嫩梢的末端执行器,通过预设夹持力使夹持 件夹断嫩梢叶柄,对一芽一叶和一芽两叶都达到较高的采 摘率。纵观现有大宗茶采摘末端执行器的结构和特点,多 以刀片切割的方式作为采摘原理,无法保证芽叶的完整,这 将在很大程度上降低茶叶的品质,不能用于高档名优绿茶 采摘。南京林业大学 [ 8~12 ] 基于机器视觉、颜色特征、并联 机器人等技术,研发了对新梢有选择性采摘的机器人,研制 了一种气动采摘指,设置固定阈值,确定采摘指夹持嫩芽时 的闭合间隙,通过提拉动作完成采摘,成功率达到 90 % 。 由于自然生长的新梢枝条粗细不一,夹持时的夹持力波动 较大,会存在打滑或夹断现象。 针对现有采茶末端执行器导致嫩芽完整性的不足,本 文设计了一种柔性可感知的仿生采摘指作为采茶机器人的 末端执行器,模仿人工“提手采”的动作,通过固定和提拉 动作实现嫩芽采摘,并增加夹持力测量电路,在夹持过程中 检测夹持力,提高采摘成功率。

催化IVF结果预测:探索高级机器学习范例以提高成功率预后
这项研究解决了通过将高级机器学习范式与妇科专业知识相结合来增强体外受精(IVF)成功率预测的研究问题。该方法涉及对2017年至2018年和2010 - 2016年全面数据集的分析。使用了机器学习模型,包括逻辑回归,高斯NB,SVM,MLP,KNN和合奏模型,例如随机森林,Adaboost,Logit Boost,Rus Boost和RSM。关键发现揭示了IVF成功预测中患者人口统计学,不育因子和治疗方案的重要性。值得注意的是,集合学习方法表现出很高的精度,而Logit提升的精度为96.35%。这项研究的含义涵盖了临床决策支持,患者咨询和数据预处理技术,突出了个性化的IVF治疗和持续监测的潜力。该研究强调了妇科医生和数据科学家之间合作的重要性,以优化IVF结果。前瞻性研究和外部验证被认为是未来的方向,有望进一步彻底改变生育治疗,并向面临不育挑战的夫妇提供希望。

有效的项目管理策略,用于识别和解决项目的复杂性并提高项目的成功率
这篇论文由 ScholarWorks 的 Walden 论文和博士研究系列免费提供给您,供您开放访问。它已被 ScholarWorks 的授权管理员接受并纳入 Walden 论文和博士研究。欲了解更多信息,请联系 ScholarWorks@waldenu.edu 。

提高胚胎植入成功率:α胸腺肽在调节复发性植入失败的免疫反应中的作用
摘要 复发性植入失败 (RIF) 是生殖医学领域的一大难题,影响了大约 10-15% 接受辅助生殖技术的夫妇。尽管 RIF 的确切病因与多种因素有关,但仍然难以捉摸。本研究探讨了胸腺分泌的小蛋白质 α 胸腺肽在提高植入成功率方面的潜在免疫调节作用。该研究涉及新德里国际生育中心的 14 名有 RIF 病史的参与者。参与者在月经周期开始时分两剂服用 3.2 毫克 α 胸腺肽,并在胚胎移植前服用额外一剂。数据收集和分析使用 SPSS 26 版进行,重点关注治疗与妊娠结果之间的关联。在 14 名参与者中,64.3% 的治疗后血清 β HCG 检测呈阳性,其中 88.9% 的参与者在超声检查中显示心脏活动。统计分析显示,阿尔法胸腺肽给药与血清孕酮水平或患者人口统计学变量(年龄和 BMI)之间没有显著相关性。阿尔法胸腺肽可能通过免疫调节增强子宫环境对胚胎植入的接受度。然而,鉴于本研究样本量小且属于探索性研究,需要进一步研究(包括随机对照试验)才能最终确定其疗效。
STEM、医疗保健副学士学位可助您摆脱贫困,但研究发现成功率存在巨大差异
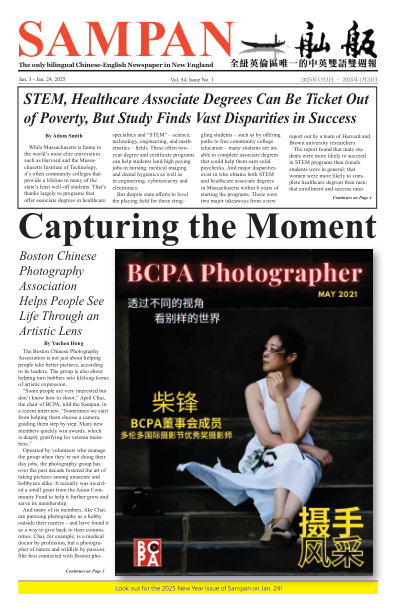
波士顿华人摄影协会的领导人表示,协会不只是帮助人们拍出更好的照片。该协会还致力于将业余爱好转变为终身的艺术表达形式。“有些人很感兴趣,但不知道如何拍摄,”波士顿华人摄影协会主席 April Chai 在最近接受《Sampan》采访时说。“有时我们会从帮助他们选择相机开始,一步一步地指导他们。许多新成员很快就赢得了奖项,这对老成员来说非常令人欣慰。”该摄影协会由志愿者运营,他们在不做日常工作的时候管理该协会。在过去十年中,该协会在业余爱好者和摄影爱好者中培养了摄影艺术。该协会最近获得了亚洲社区基金会的一笔小额资助,以帮助其进一步发展并为其成员提供服务。许多成员,比如 Chai,都在职业之外追求摄影爱好——并发现这是回馈社区的一种方式。例如,柴的职业是医生,但热爱自然和野生动物摄影。她最初与波士顿摄影师联系,
GAO-16-5,国防高级研究计划局:关键因素推动技术转型,但更好的培训和数据传播可以提高成功率
自 2010 年以来,国防高级研究计划局 (DARPA) 在技术转型方面取得了成功——将新技术从研究环境迁移到军事用户(包括国防部 (DOD) 采购计划和作战人员)的过程。但是,由于该机构在定义和评估其转型结果方面存在不一致,因此 GAO 无法可靠地报告 DARPA 在 2010 财年至 2014 财年期间成功完成的 150 个项目的转型绩效。这些不一致部分是由于该机构跟踪技术转型的流程存在缺陷。尽管如此,GAO 对 10 个选定项目的分析确定了有助于转型成功的四个因素,其中最重要的是军事或商业对计划技术的需求以及与 DARPA 持续关注的研究领域的联系。这两个因素通常在项目开始时就很明显,而其他两个因素则是在项目进行后才观察到的。下图突出显示了这四个因素。

适用于NSF研究生研究奖学金计划
- 2017年:〜13,200申请 - 〜15%成功率 - 2018年:〜12,400申请 - 〜16%的成功率 - 2019年:〜12,200申请 - 〜16%的成功率 - 2020年:〜12,900申请-〜16%的成功率
GAO-16-5,国防高级研究计划局:关键因素推动技术转型,但更好的培训和数据传播可以提高成功率
自 2010 年以来,国防高级研究计划局 (DARPA) 在技术转型方面取得了成功——将新技术从研究环境迁移到军事用户(包括国防部 (DOD) 采购计划和作战人员)的过程。但是,由于该机构在定义和评估其转型结果方面存在不一致,因此 GAO 无法可靠地报告 DARPA 在 2010 财年至 2014 财年期间成功完成的 150 个项目的转型绩效。这些不一致部分是由于该机构跟踪技术转型的流程存在缺陷。尽管如此,GAO 对 10 个选定项目的分析确定了有助于转型成功的四个因素,其中最重要的是军事或商业对计划技术的需求以及与 DARPA 持续关注的研究领域的联系。这两个因素通常在项目开始时就很明显,而其他两个因素则是在项目进行后才观察到的。下图突出显示了这四个因素。

目标状态数量不确定的稳健量子搜索
M / N 和 j op = [( π / 2 − β ) / ( 2 β )] 是最优 Grover 迭代次数。如果 ( 2 j op + 1 ) β ≈ π / 2,则最大概率趋近于 1,这意味着如果量子数据库的维数很大,Grover 算法通常具有很高的成功率。Grover 算法经历了几个重要的发展。在某些情况下,比如结构化搜索 [ 7 ],其成功率是各个搜索成功率的乘积,因此每个单独搜索的高成功率至关重要;特别是当维度不是那么大时,标准 Grover 算法的效果会不佳。为了解决这个问题,一些改进的搜索算法被提出 [ 8 – 12 ]。Grover-Long 算法 [ 11 ] 是这些改进算法之一,已被证明是最简单、最优的 [ 13 , 14 ]。该算法的成功率达到 100%,而 Grover 算法在找到 4 个中的 1 个时才能达到 100% 的成功率。在 Grover 原始算法和 Grover 改进算法中,都需要提前知道标记状态的确切数量。因此,如果不知道确切数量,这些算法就无法确定何时停止 [15]。空间搜索 [16-18] 是解决此问题的方法之一。定点搜索算法是另一种方法
可持续航空燃料大挑战
3 项目成功率是根据历史数据计算得出的,用于估计预计成功生产 RD 和/或 SAF 的活跃项目数量。根据 RD 和 SAF 项目的历史数据库得出的平均项目成功率为 0.5,并适用于所有当前未投入生产的活跃 RD 和 SAF 项目。项目成功率为 1.0,适用于活跃生产项目以及所有已宣布的协同处理项目,因为它们被认为具有较高的实施率。