XiaoMi-AI文件搜索系统
World File Search System手动控制

手动控制前馈的控制理论模型
控制车辆是许多人日常生活的一部分。了解人类如何控制车辆对于车辆及其与人类控制器的接口的设计尤为重要。它使工程师能够设计更快、更安全、更舒适、更节能、更通用、更好的车辆。尤其是现在,当自动化使我们能够以各种可以想象的方式支持人类控制器时,了解人类如何控制和与车辆交互非常重要。人类和自动化将动态共享对车辆的控制权。因此,自动化应该(至少!)围绕人类进行设计,但如果自动化的行为方式与人类的控制行为相似,那就更好了。如果自动化表现得像人类控制器,人类控制器就能更好地理解自动化的意图,从而提高安全性、增加舒适度并更容易被接受。人类控制器 (HC) 几乎总是控制着车辆以实现高级目标。为了实现这一高级目标,HC 需要连续执行大量较小的任务,这些任务通过向车辆提供“控制输入”来实现:转动方向盘、踩下油门、拉动直升机上的总杆、转动旋钮等。要理解高级目标和低级控制输入之间的关系,有助于

航天器驾驶、手动控制设计概述...
简介 本报告介绍了使航天器更适合人类操作的技术。从最高层次开始,第一部分介绍了一般航天器驾驶和工作负荷,提出了一个概念框架,即 OODA 循环,作为改进工具。作为一般可操作性的一个子集,第二部分介绍了手动控制。本文介绍了从全手动到全自动的控制范围概念,以及在现代航天器中实现手动控制能力的基本原理。还提供了阿波罗和航天飞机的手动控制能力摘要作为成功实施的示例。成功的手动控制需要令人满意的操控品质,第三部分提供了该主题的高级摘要。

SERVOPRO-多精度
阀块:阀块将在三种气流、样品、低校准和高校准之间切换。它配有自动验证/自动校准板,可自动和手动控制阀门。对于双气体分析仪,如果选择此选项,则两个气体模块都必须配备阀块

手动控制论:最新进展和当前趋势
摘要 — 手动控制控制论旨在利用人类控制动力学的数学模型来理解和描述人类如何控制车辆和设备。这种“控制论方法”可以对人类行为进行客观和定量的比较,并可以系统地优化与手动控制相关的人机控制界面和培训。当前的控制论理论主要基于 20 世纪 60 年代形式化的技术和分析方法,并且已被证明在捕捉人类认知和控制的全部范围方面能力有限。本文回顾了我们对人类手动控制知识的当前最新水平,指出了控制论的主要基本局限性,并提出了推进该理论及其应用的可能路线图。该路线图的核心将从当前的线性时不变建模方法(仅适用于严格控制和静止条件下的人类行为)转变为有助于分析现实控制任务中自适应且可能随时间变化的人类行为的方法。本文介绍了控制论领域当前的关键发展实例,这些发展有助于实现这一转变,包括人类对预览的使用、可预测的离散机动、技能获取和训练、随时间变化的人体建模以及神经肌肉系统建模。这些努力将为控制论奠定新的基础,并将影响人类所从事的所有领域。
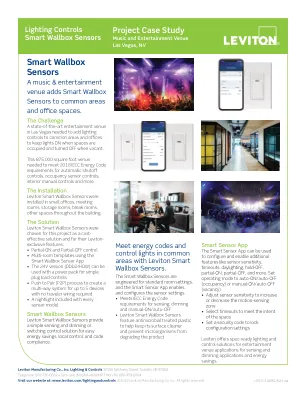
照明控制智能壁箱传感器
挑战在拉斯维加斯的最先进的娱乐场所需要在公共区域和办公室添加照明控件,以在空间占用并在空置时关闭时保持照明。满足自动关闭控件,占用传感器控件,内部手动控制等的2018 IECC能源法规所需的这个875,000平方英尺的场地。

择期神经外科全静脉输注 (TIVA) 期间靶控输注是否优于手动控制输注?单中心试点研究结果
研究过程 在手术室中,在麻醉诱导之前,将套管针(Vasofix Safety,B. Braun,德国梅尔松根)插入手背静脉。开始心电图监测,测量血压、经皮动脉血红蛋白饱和度、二氧化碳图和 BIS。进行预氧合,然后使用 MCI 或 TCI 方法诱导全静脉麻醉 (TIVA)。使用 Perfusor Space 输注泵(B. Braun,德国梅尔松根)输注瑞芬太尼(Ultiva,Aspen Pharma,南非乌姆兰加)和丙泊酚(Propofol 1% MCT/LCT,Fresenius,德国巴特洪堡)。 P-TCI 组首先输入患者的人口统计学数据(身高、性别、体重和年龄),并设定效应点初始靶浓度:Schnider 模型中丙泊酚为 4 µg/mL,Minto 模型中瑞芬太尼为 4 ng/mL。P-MCI 组首先以 1.5 mg/kg IBW 剂量推注丙泊酚,以 0.5 μg/kg IBW 剂量推注瑞芬太尼,持续 1 分钟。
Stantec 斑马,1961
CRT 监视器显示允许同时检查 4 个存储的内容。电压和脉冲幅度的边际变化可用于检测早期组件故障。提供测试程序以用于边际测试设施。使用插入式电子装置,结合经过充分验证的设计的插头和插座布置;提供备件,以便可以移除可疑装置进行测试,并在必要时进行维修。提供测试键,以便在手动控制下设置订单或说明,并执行分步操作。

卡帕加姆高等教育学院
UTM 机器的主要特点是结合了设计特点,能够进行高精度测试,经济、快速、多功能。加载精度高达 ± 1%。以可变速度拉伸,适合各种材料。可在 PC 上显示/打印的图表可用于研究材料的行为。RS 232 串行端口可将数据传输到计算机进行分析/存储评估等。手动控制和释放值打开。

MAC 量子洗面奶
引言................. ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... 5 色温控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 平移和倾斜. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... ................. ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................................................................................................................................................................................................................................................... 9 出厂默认设置.................... ... ................. ... 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。........................................................................................................................................................................................................................................ 11 测试序列....................................................................................................................................................................................................................................... ........................................................................................................................................................................................ ........................................................................................................................................................................................ ........................................................................................................................................................................................ 11 手动控制....................................................................................................................................................................................................................... ........................................................................................................................................................................ ................. ... ................. ... . ... ................. ... ................................................................................................................................................................................................................................. 14 RDM 通讯....................................................................................................................................................................................................................................... ........................................................................................................................................................................................ ........................................................................................................................................................................................ ........................................................................................................................................................................................ 14 软件服务功能....................................................................................................................................................................................................................................... ........................................................................................................................................................................ ........................................................................................................................................................ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... 16 从固件版本 1.xx 更新至 2.0.0 ........................................................................................................................................................ ........................................................................................................................................ .................................................................................................................................. .................................................................................................................................. 17 DMX 协议 ........................................................................................................................................................................................................................ ........................................................................................................................................................ ........................................................................................................................................................ ........................................................................................................................................ ........................................................................................................................................ . ... 18 基本模式. ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... .................................................................................................................................................................................................. 22 FX:预编程效果.......................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................ ........................................................................................................................................................................ 28 色温控制数据....................................................................................................................................................................................................................................................................................... ........................................................................................................................................................ .................................................................................................................................................. .................................................................................................................................................. .................................................................................................................................................................................................................................................................................................................................................................................................................... 29 控制面板菜单.................. ... .....................................................................................................................................................................................................................................33 警告消息..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................33 错误消息.......................................................................................................................................................................................................................................................................................................................................................................33 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 34
TALON MC 无固定钩 STC SR00713SE
悬挂系统是 Bell 204-072-915-103 悬挂系统的替代品。悬挂系统经核准可承载高达 5,000 磅(2,267 公斤)的负载。有关特定直升机的承载能力,请参阅基本旋翼飞行手册。该系统连接到现有的 Bell 硬点并使用 Bell 供给套件。安装前,请确保正确安装并操作了相应的 Bell 供给套件。悬挂系统悬挂在横梁上,大约位于重心处。它穿过机身下部蒙皮底部的开口。货钩装置为无固定器类型,提供电动和手动控制释放。