XiaoMi-AI文件搜索系统
World File Search System扫描模式

驾驶员的视线行为和扫视模式
在弯路上驾驶时执行次要任务(或与驾驶无关的任务)可能存在风险且不安全。本研究的目的是探索是否可以使用多种眼球运动测量方法来评估弯路和次要任务情况下的驾驶安全性。除了典型的静态视觉测量(例如扫视频率和持续时间)之外,我们还采用了基于马尔可夫的转换算法(转换/平稳概率、熵)来量化驾驶员的动态眼球运动模式。这些算法的评估基于一项实验(Jeong & Liu,2019)的数据,该实验涉及多种道路曲率和刺激-反应次要任务类型。在较陡的弯道中,驾驶员更有可能长时间扫描少数感兴趣的区域。在实验中,不太陡的弯道中总的低头扫视时间更长,但从长远来看,较陡的弯道中低头扫视的概率更高。感兴趣区域之间的可靠转换次数因次要任务类型而异。视觉要求不高的任务的视觉扫描模式与视觉要求高的任务一样随机。与典型的静态测量相比,基于马尔可夫的动态眼球运动测量可以更好地了解驾驶员的潜在心理过程和扫描策略。所提出的方法和结果可用于车载系统设计和进一步分析交通领域的视觉扫描模式。
驾驶员的视线行为和扫视模式
在弯路上驾驶时执行次要任务(或与驾驶无关的任务)可能存在风险且不安全。本研究的目的是探索是否可以使用多种眼球运动测量方法来评估弯路和次要任务情况下的驾驶安全性。除了典型的静态视觉测量(例如扫视频率和持续时间)之外,我们还采用了基于马尔可夫的转换算法(转换/平稳概率、熵)来量化驾驶员的动态眼球运动模式。这些算法的评估基于一项实验(Jeong & Liu,2019),该实验涉及多种道路曲率和刺激-反应次要任务类型。在较陡的弯道中,驾驶员更有可能长时间扫描少数感兴趣的区域。在实验中,不太陡的弯道中总的低头扫视时间更长,但从长远来看,较陡的弯道中低头扫视的概率更高。感兴趣区域之间的可靠转换次数因次要任务类型而异。视觉要求不高的任务的视觉扫描模式与视觉要求高的任务一样随机。与典型的静态测量相比,基于马尔可夫的动态眼球运动测量提供了更好的洞察力,可以更好地了解驾驶员的潜在心理过程和扫描策略。所提出的方法和结果可用于车载系统设计和进一步分析交通中的视觉扫描模式

Leica ALS70
n n 每个出站脉冲的无限距离返回,可更详细地了解森林冠层 n n 返回距离间隔减少 40%,可在低植被环境中更好地检测地面 n n 电路板数量减少 25%,可靠性更高 n n 3 种用户可选扫描模式:正弦波、三角形和光栅,可对点模式进行无与伦比的控制 n n 自动扫描:自动调整扫描速率,以随着飞机速度的变化保持更均匀的沿轨间距(Leica ALS70-CM 和 Leica ALS70-HP) n n 可选全集成全波形数字化仪 (FWD),可收集高达 120 kHz 的波形数据

36DL PLUS - 先进测试设备租赁
• 易于读取的厚度显示屏,带有与测量相关的状态标志 • 带有可选背光的 LCD,可在所有照明条件下清晰显示信息 • 自动探头识别 • 轻松校准未知材料速度和/或传感器零点 • 快速补偿传感器温度变化 • 回波到回波测量,适用于穿透油漆应用 • 高低厚度报警功能 • 快速扫描模式,每秒 20 次读数。• 以 1db 为步长手动增益调整 • 在信号丢失 (LOS) 条件下保持或空白厚度显示 • 使用 MinFinder 的“保持最小或最大”读数模式 • 以绝对值或百分比显示相对于设定点的差分厚度 • 即时英制/公制转换 • 校准锁定功能可防止意外更改校准 • 可选分辨率 .001" (.01mm) 或 .01" (.1mm) • 自动关机

汽车激光雷达传感器技术概念综述
摘要。许多人认为汽车 LiDAR 传感器是实现更高级别自动驾驶功能的支持技术。业界可以找到设计这种传感器的不同概念。其中一些已经集成到消费汽车中,而许多其他承诺很快投入批量生产,以实现足够高的成本效益以实现广泛部署。然而,汽车 LiDAR 传感器仍在不断发展,不同的公司正在追求各种传感器设计。在这里,我们构建了汽车 LiDAR 设计空间,以直观地描述这些传感器的系统设计选项。随后,我们用已发表专利申请中的图纸(重点介绍扫描机制和扫描模式)举例说明这些概念,然后再讨论它们的优势和挑战。© 2023 光学仪器工程师协会 (SPIE) [DOI:10.1117/1.OE.62.3.031213]
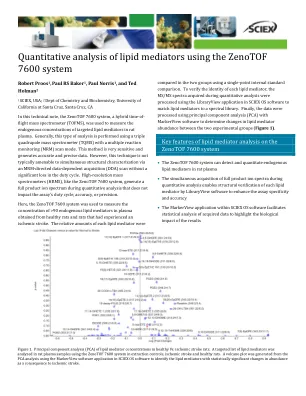
使用Zenotof ...
在此技术说明中,使用杂种7600系统(杂种时间)质谱仪(TOFM)来测量大鼠血浆中靶向脂质介质的内源浓度。通常,使用具有多重反应监测(MRM)扫描模式的三倍四极质量光谱仪(TQM)进行此类分析。此方法非常敏感,并生成准确而精确的数据。但是,这种技术通常不适合通过MRM指导的数据依赖性采集(DDA)扫描同时进行结构表征,而在占空比中没有显着损失。高分辨率质谱器(HRMS),例如Zenotof 7600系统,在定量分析过程中生成完整的产物离子光谱,不会影响测定的占空比,准确性或精度。

Agilent 8663A 合成信号发生器 100 kHz 至 2.56 ...
2 在远程模式下,可能存在间隔 3 MHz 的微处理器时钟相关杂散信号,其电平通常为 <-80 dBc。3 在 50 Hz 线路频率下,电力线或微音相关杂散信号可能高出 3 dB,并且出现在距载波高达 1 kHz 的偏移处。4 8663A 使用微处理器电平精度增强程序,在 +16 dBm 和 -119.9 dBm 之间的电平范围内实现 ±1 dB 绝对电平精度和平坦度。可以使用特殊功能禁用此增强功能。5 包括平坦度、衰减器误差、检测器误差和测量不确定度。6 在扫描模式下,正常的微处理器电平精度增强程序被禁用。可以使用特殊功能在扫描期间选择电平精度增强,但最小扫描时间通常限制为 10 毫秒/步。

HFACS 1. 不安全行为 - Carec
基于技能的错误。在航空领域,基于技能的行为最好被描述为“操纵杆和方向舵”以及其他无需大量有意识思考的基本飞行技能。因此,这些基于技能的行为特别容易受到注意力和/或记忆力下降的影响。事实上,注意力下降与许多基于技能的错误有关,例如视觉扫描模式的崩溃、任务固着、无意中激活控件以及程序中步骤的顺序错误等(表 1)。一个典型的例子是飞机机组人员过于专注于排除烧坏的警告灯故障,以至于他们没有注意到他们致命地坠落到地面。也许更贴近现实的例子是,想想那个倒霉的人,他把自己锁在车外或错过了出口,因为他要么分心了,要么很匆忙,要么在做白日梦。这些都是注意力不集中的例子,在高度自动化的行为中很常见。不幸的是,在家里或在城里开车时,这些注意力/记忆力下降可能令人沮丧,在空中它们可能会变得灾难性。
化学筛查和小球藻的粗提取物的化学筛查和抗菌活性。在
使用Agilent 5973N模型质量选择性检测器(美国圣克拉拉)进行分析。Restek RTX-5MS(30 m×0.25 mm I.D.×0.25μm)气相色谱毛细管柱用作sta tionary阶段(美国贝尔方特)。气相色谱级(超纯色)氦气。分别将注入端口,离子源,四极杆和传递线温度保持在280°C,230°C,150°C和280°C下。GC烤箱程序在50°C保持2分钟,然后在4°C/min下增加到280°C,并保持10分钟。总分析时间为70分钟。质量范围为50-550 m/z,在完整扫描模式下,扫描速率为每秒0.45扫描。使用70 eV电离能进行电子电离。使用质量猎人软件(Qualita Tive Analysis B.07.00)和NIST质谱库确定并确定化合物。

圆锥型机载激光雷达扫描系统的设计与实现
摘要:目前LiDAR以单点LiDAR为主,APD阵列和激光器阵列受限于出口,面阵LiDAR数量稀少。单点LiDAR发射激光后无法在地面形成只有一个激光点的扫描模式,所以必须有一套针对单点LiDAR的扫描装置。本文设计的扫描装置通过旋转折射棱镜在地面形成圆形扫描区域,同时形成锥形视场。目前船用LiDAR较多采用该类扫描仪,该类扫描仪的优点是:机械结构简单,运行平稳,飞行过程中可得到重叠的椭圆形扫描轨迹,增加了扫描密度。本文采用超低色散玻璃作为折射棱镜,在一定的激光频率范围内,折射棱镜对不同频率的激光折射效果几乎相同。仿真结果表明,该扫描仪可以作为普通LiDAR扫描仪使用,也可以作为双频LiDAR扫描仪使用。