XiaoMi-AI文件搜索系统
World File Search System抓地力

政策摘要抓住了英国CCU的可持续增长机会
只是过渡到运营行动,从而带来了企业行为的真正变化。需要更深入地了解公正的过渡在实践中意味着什么。一个共同的商定框架定义了企业可以合理地期望的东西,将使投资者能够将正式过渡纳入公司绩效,股东参与计划和资本分配以及与政策制定者和其他利益相关者(例如工会)的对话。

路面条件传感器
当前的高级驾驶员援助系统(ADA),例如ASR(防滑法规),以及完全自动驾驶的车辆,可以在每种驾驶场景(包括诸如泥土之路等极端环境)中替代人类驾驶员,需要根据路面条件进行更精确的驱动器控制。路面条件高度影响其握力,例如,由于存在水坑或在道路表面上存在黑冰的存在,因此将表面抓地力高度降低,因此在路面上存在黑冰,因此在车辆之前对路面控制的评估将导致驱动器控制系统的开发,从而导致驱动控制系统的发展,这些系统可以预期这些条件尚未受到启动。测量路面条件的技术已使用不同的方法(例如雷达[1],基于视觉的技术[2])以及在近红外[3]中对不同使用的反射进行评估。这种后来的方法导致了几种商业传感器的开发,这些传感器正广泛地参与冬季活动和道路天气信息系统(RWIS)[4,5]。最新的光学道路条件传感器在NIR/SWIR-Spectrum(使用激光源或LED)中使用多个波长,以对道路上的污染物(水,冰,雪)进行分类,并从该信息中估算表面抓地力。其中一些传感器是固定的,这意味着它们必须安装在道路侧面或桥梁的柱子中,而其他则是移动传感器,其旨在安装在维护车辆的板上。固定和移动对这些信息的现场测试和实验室测试得出的结论是,基于路面背面反射的光谱数据的分类算法通常可以识别沥青底物上的污染物[5,6]。


hapticColling:在虚拟工具期间使用僵硬碰撞的未接地力反馈
允许将本工作的全部或一部分供个人或课堂使用的数字或硬副本授予,而没有费用,只要副本不是盈利或商业优势,并且副本带有此通知和首页上的完整引用。必须尊重他人所拥有的这项作品的组成部分的版权。允许用信用摘要。否则复制或重新出版以在服务器上发布或重新分配到列表,需要事先特定的许可和/或费用。请求权限从permissions@acm.org。

外部汇总IT部分 - 陪审团报告...
资格测试计划由终端(NSI)专业(NSI)专业(NSI)的教学计划组成,该课程是伟大的学校“数学,物理,工程和计算机科学”(MP2I)(MP2I)以及“数学,物理学,IT,MPI”(MPI)的科学准备课程的终端周期的教学课程,该课程的科学准备课程。此补充计划是由陪审团制定的。目的是使他能够评估候选人在所教授的概念上的下降,并由上述计划的“抓地力”设计。让我们回想起,对于整个计划,候选人预计将是对应于主级别的下降。在2024届会议上,书面测试是由学院组织的2月20日至22日举行的:

人grasps Generation
在预测具有平行颚夹具的机器人抓地力已得到很好的研究并广泛应用于机器人操作任务中,但多手指手的自然人抓握生成研究的研究仍然是一个非常具有挑战性的问题。在本文中,我们建议在世界上给定3D对象产生人类的抓。我们的主要观察结果是,对手接触点和物体接触区域之间的一致性建模至关重要。也就是说,我们鼓励先前的手接触点靠近对象表面,并且对象共同的接触区域同时通过手接触。基于手动接触一致性,我们在训练人类掌握的一代模型中设计了新的目标,还设计了一个新的自我监督任务,该任务允许在测试时间之前调整掌握生成网络。我们的实验表明,人类掌握的产生显着改善,而对最先进的方法的差距很大。更有趣的是,通过在测试时间内使用自我监督的任务来优化模型,它可以帮助您在看不见和室外对象上获得更大的收益。
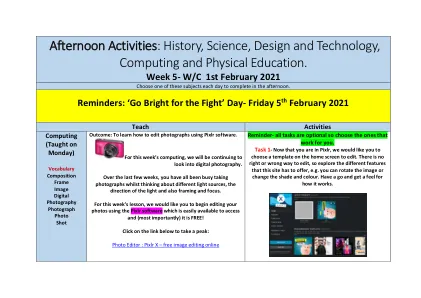
下午活动:历史,科学,设计和技术,
拥有以便太空服可以在太空中正常工作吗?首先,将日期写在您的蓝书和科学的下一页顶部,为您的标题。在您的标题下,写下了太空服的关键部分的列表,以及每个部分都需要拥有的属性。使用下面的示例为您提供帮助:头盔 - 坚固,透明并挡出阳光。手套 - 坚固,灵活,抓地力。靴子 - 耐用,坚固,坚固。管道 - 柔性,耐用,弯曲。写下您可以想到的,然后写下哪种材料适合您的太空服,例如头盔可以由金属或塑料制成。任务3-绘制您的设计。就像您在D&T中使用的月球越野车一样,您将使用ESA(欧洲航天局)模板在学校网站上以及在PowerPoint的Slide 10上绘制和标记乘坐太空服设计。

用一只手抓住多个对象
摘要 - 人手的错综复杂的运动学能够同时抓握和操纵多个对象,这对于诸如对象传递和手持操作等任务必不可少。尽管具有重要意义,但机器人多对象抓握的领域是相对尚未探索的,并且在运动学,动力学和对象配置方面面临着显着的挑战。本文介绍了Multigrasp,这是一种新型的两阶段方法,用于在桌面上使用灵巧的多指机器人手抓住多物体。该过程包括(i)生成pre-grasp提案,以及(ii)执行掌握和提起对象。我们的实验重点主要是双对象抓地力,达到了44.13%的成功率,突出了对新对象配置的适应性和不精确的掌握能力。此外,该框架证明了以推理速度为代价的两个以上对象的潜力。

dexgraspnet 2.0:在大规模合成的杂物场景中学习生成灵巧的抓握
摘要 - 由于数据稀缺,在混乱的场景中挖掘仍然是灵巧的手。为了解决这个问题,我们提出了一个大规模的合成数据集,包括1319个对象,8270个场景和4.26亿个格拉斯普斯。除了基准测试之外,我们还从掌握数据中探索了数据有效的学习策略。我们揭示了以局部特征为条件的生成模型和强调复杂场景变化的GRASP数据集的组合是实现有效概括的关键。我们提出的生成方法在模拟实验中优于所有基准。更重要的是,它通过测试时间深度恢复表明了零拍的SIM到现实转移,获得了90.70%的现实世界灵巧抓地力成功率,展示了利用完全合成训练数据的强大潜力。