机构名称:
¥ 1.0
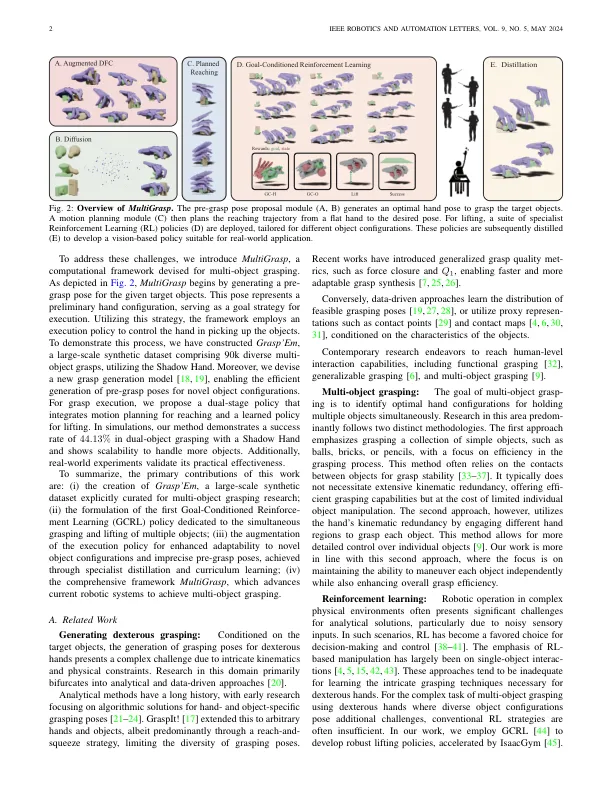
摘要 - 人手的错综复杂的运动学能够同时抓握和操纵多个对象,这对于诸如对象传递和手持操作等任务必不可少。尽管具有重要意义,但机器人多对象抓握的领域是相对尚未探索的,并且在运动学,动力学和对象配置方面面临着显着的挑战。本文介绍了Multigrasp,这是一种新型的两阶段方法,用于在桌面上使用灵巧的多指机器人手抓住多物体。该过程包括(i)生成pre-grasp提案,以及(ii)执行掌握和提起对象。我们的实验重点主要是双对象抓地力,达到了44.13%的成功率,突出了对新对象配置的适应性和不精确的掌握能力。此外,该框架证明了以推理速度为代价的两个以上对象的潜力。
用一只手抓住多个对象
主要关键词



相关文件推荐