
机构名称:
¥ 1.0
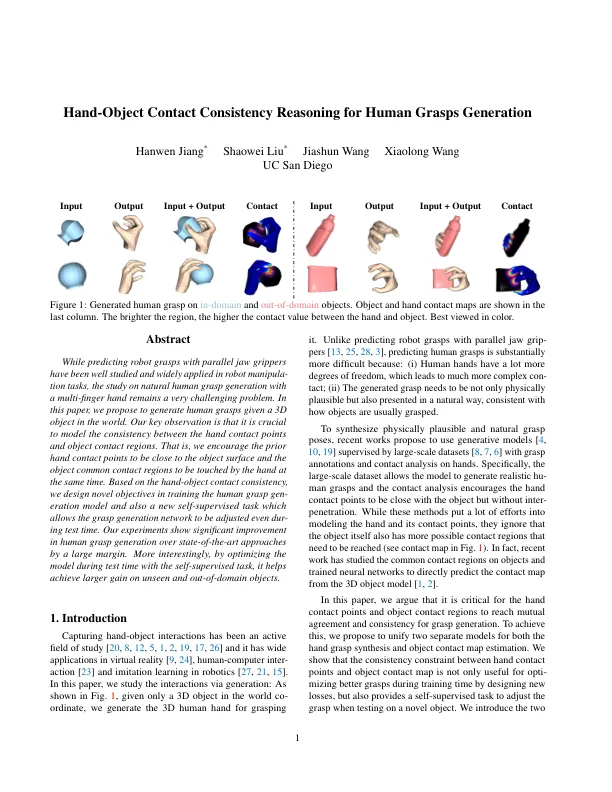
在预测具有平行颚夹具的机器人抓地力已得到很好的研究并广泛应用于机器人操作任务中,但多手指手的自然人抓握生成研究的研究仍然是一个非常具有挑战性的问题。在本文中,我们建议在世界上给定3D对象产生人类的抓。我们的主要观察结果是,对手接触点和物体接触区域之间的一致性建模至关重要。也就是说,我们鼓励先前的手接触点靠近对象表面,并且对象共同的接触区域同时通过手接触。基于手动接触一致性,我们在训练人类掌握的一代模型中设计了新的目标,还设计了一个新的自我监督任务,该任务允许在测试时间之前调整掌握生成网络。我们的实验表明,人类掌握的产生显着改善,而对最先进的方法的差距很大。更有趣的是,通过在测试时间内使用自我监督的任务来优化模型,它可以帮助您在看不见和室外对象上获得更大的收益。
人grasps Generation
主要关键词
相关文件推荐




















![ORACLE®高级支持网关安全指南
使用Oracle Advanced Queuing(aq)适配器与Oracle Integration Generation 2
[1]Oracle®高级支持网关
高级安装和配置指南
管理Oracle高级身份验证和Oracle自适应风险管理
交易事件队列和高级排队用户指南
Oracle Linux配置虚拟专用网络
Oracle Fusion Cloud SCM
实施Oracle Fusion Data Intelligence
oracle融合数据智能的已知问题
Oracle Fusion Data Intelligence中的新功能
Oracle Fusion Data Intelligence中的新功能
oracle®高级定价
Oracle®高级收藏
开始使用Google Workspace的Oracle Smart View
智能视图24.200 readme
智能视图用于办公室安装和配置指南,...
高可用性概述和最佳实践](/simg/f/f3477443665a74e7f7dc13a9d9090e6ce9c038db.webp)