XiaoMi-AI文件搜索系统
World File Search System抽样

教学大纲:博士D.课程工作结构
Paper-1:标记= 100组-A:研究方法(标记= 75)研究:含义,特征,类型,重要性。定义研究问题。先前作品的文献调查。数据收集,定性和定量数据,数据解释,数据的图形表示,错误分析的方法。科学文章和论文写作的技术方面:材料,样式,图形,图形,表,脚注,参考等的组织组织。科学论文演示:一个研讨会纸制备(口头或海报),其中包括文本,图形,图片,表格,参考等,问答环节。专利法律,申请研究发现的过程,版权,网络法律,科学伦理,窃。理论,原理,法律,假设,假设,命题之间的差异。假设制定的经验基础。假设制定中的错误类型。操作系统和计算语言:Windows,Linux的兼容性。c语言,matlab,Mathematica,tecplot,gnuplot,xfig。测试假设,t检验,f检验,z检验,相关性,回归,拟合测试的好处,ANOVA,分散。分析技术,光谱技术,纯化技术,合成方法。化学物质的毒性,化学物质和溶剂在实验室中的储存和处理。 环境抽样设计,计划和采样协议。 空气,地表,地下水,土壤和沉积物的标准抽样方法。化学物质的毒性,化学物质和溶剂在实验室中的储存和处理。环境抽样设计,计划和采样协议。空气,地表,地下水,土壤和沉积物的标准抽样方法。组B:基本的计算机应用程序(标记= 25)课程提纲是由计算机和系统研究部构建和教授的。


统计调查标准和指南 | SAMHSA
第 1 部分 概念、方法和设计的开发 调查规划标准 1.1: 发起新调查或对现有调查进行重大修订的机构必须制定书面计划,阐明理由,包括: 目标和目的; 潜在用户; 调查旨在告知的决策; 关键的调查估计值; 估计值所需的精度(例如,需要检测到的差异大小); 为决策和其他用途提供信息的制表和分析结果; 相关和以前的调查; 为避免与其他信息来源不必要重复而采取的步骤; 用户何时以及多久需要一次数据; 以及制表、机密微观数据和公共使用数据文件所需的详细程度。 调查设计标准 1.2: 机构必须制定调查设计,包括定义目标人群、设计抽样计划、指定数据收集工具和方法、制定切合实际的时间表和成本估算,以及使用普遍接受的统计方法(例如,可以提供抽样误差估计的概率方法)选择样本。任何使用非概率抽样方法(例如截止样本或基于模型的样本)都必须经过统计论证,并能够测量估计误差。样本的大小和设计必须反映出制表和其他数据产品所需的详细程度,以及关键估计所需的精度。记录每个

Mark Moll的课程Vitae
本杰明·塔姆(Benjamin Tam),博士,澳大利亚昆士兰州大学自治机器人的自适应行为选择,2023年3月。Adam Pettinger博士,使用负担能力原始人来增强德克萨斯大学奥斯汀分校的机器人操纵任务自治和执行,2023年3月。Jeroen de Maeyer博士,受约束的最终效果路径下面:基于抽样的计划算法和基准测试框架,Ku Leuven,2021年11月。Andrew Short,博士,基于抽样的运动计划与联系人,沃隆隆大学,2020年6月。 Bryce Willey,MS,在2018年8月莱斯大学合并了机器人路径计划中的采样和优化。 Zachary Kingston,MS,一个基于限制抽样计划的统一框架,莱斯大学,2017年11月。 戴夫·科尔曼(Dave Coleman),博士,改善使用经验的运动计划的方法,科罗拉多大学博尔德大学,2016年12月。 Stephen Butler,MS,《时间 - 最佳轨迹生成问题》的一般算法,莱斯大学,2016年11月。。 Ryan Luna,博士,在复杂领域的机器人运动计划中结合了离散和连续的推理,莱斯大学,2016年5月。。 Devin Grady,博士,运动计划,与机器人任务中的不确定信息,莱斯大学,2013年12月。。Andrew Short,博士,基于抽样的运动计划与联系人,沃隆隆大学,2020年6月。Bryce Willey,MS,在2018年8月莱斯大学合并了机器人路径计划中的采样和优化。Zachary Kingston,MS,一个基于限制抽样计划的统一框架,莱斯大学,2017年11月。戴夫·科尔曼(Dave Coleman),博士,改善使用经验的运动计划的方法,科罗拉多大学博尔德大学,2016年12月。Stephen Butler,MS,《时间 - 最佳轨迹生成问题》的一般算法,莱斯大学,2016年11月。Ryan Luna,博士,在复杂领域的机器人运动计划中结合了离散和连续的推理,莱斯大学,2016年5月。Devin Grady,博士,运动计划,与机器人任务中的不确定信息,莱斯大学,2013年12月。

2024 年 12 月月度建筑支出
在解释本新闻稿中的统计数据变化时,请注意,季节性调整后的统计数据的月度变化通常显示出可能不规则的变动。可能需要 2 个月才能确定总体建筑的基本趋势,而特定类别的建筑则可能需要长达 8 个月的时间。本新闻稿中的统计数据是根据多个来源和调查估算的,并且受抽样变异性以及非抽样误差的影响,包括偏差和响应方差、未报告和覆盖不足。表 3 提供了标准误差的估计值。每当文本中出现诸如“2.3(±3.1%)以上”之类的陈述时,这表示实际百分比变化可能发生的范围(-0.8 到 +5.4%)。给出的所有范围都是 90% 的置信区间,仅考虑抽样变异性。如果范围不包含零,则变化具有统计意义。如果它包含零,则变化不具有统计意义;也就是说,不确定是增加了还是减少了。当月的统计数据为初步估计,可能会在随后的几个月随着更多数据的出现而进行修订。主要季节性调整组成部分的初步估计与第一次修订相比的平均绝对百分比变化如下:总建筑量为 0.88%;私人建筑量为 0.85%;公共建筑量为 2.18%。有关置信区间和抽样变异性的说明,请访问我们的网站 < www.census.gov/construction/c30/methodology.html/ >。
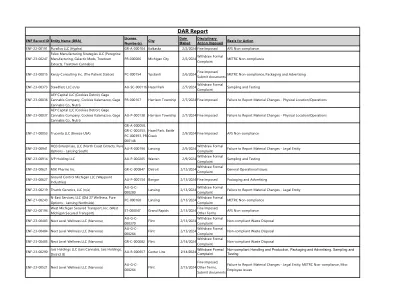
DAR 2024 年 2 月.xlsx
ENF-21-00266 3843 Euclid, LLC PR-000098;AU-P-000106 贝城 2/23/2024 罚款 一般运营问题、METRC 不合规、不合规处理和生产、包装和广告、抽样和测试

退役后满意度:2024 年职场健康调查中退伍军人关注结果
关于工作场所健康调查 工作场所健康调查 (WWS) 现已进入第五年,旨在调查人们对工作场所福利的态度。它研究了广泛的财务健康、基于就业的健康保险和退休福利问题。2024 年 WWS 包括对退伍军人的过度抽样,以便更深入地分析他们在财务健康方面面临的挑战。过度抽样的优势在于能够控制与许多关于工作场所健康的结果密切相关的重要因素。特别是,退伍军人在工作场所面临挑战——例如重返平民劳动力队伍时面临的挑战——因此可能与非退伍军人有系统性差异。由于这些独特的挑战,本问题简报使用 WWS 中制定的措施更仔细地研究了也曾在美国武装部队服役的工人。
放射性污染场地的特征...
5.2.1。现场测量。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 5.2.2.抽样程序。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。30 5.2.3。实验室测量。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33 5.2.4.仪器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。37 5.3.结果中的错误和不确定性。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.42 5.3.1.计数统计 ....................。。。。。。。。。。。。。。。。。。。。。。。。...42 5.3.2.其他不确定性来源 .................。。。。。。。。。。。。。。。。。。。。。42

Gautam Salhotra
博士学位,计算机科学(机器人技术)'24增强学习,具有归纳偏见,可变形的对象操纵和自适应抽样。论文:使用示范顾问加速机器人操纵:南加州大学Gaurav Sukhatme
通过经典方法从泡利噪声中有效恢复信息……
• 给定通道 𝒫 的描述,找到映射 𝒟 使得 𝑡𝑟𝑂𝒟∘𝒫𝜎 = 𝑡𝑟𝑂𝜎 。 • 𝒟 不是 CPTP,但可以写成 CPTP 映射的线性组合。 • 通过概率抽样模拟 𝒟 的动作。