XiaoMi-AI文件搜索系统
World File Search System拉普拉斯
B.Tech教学大纲 - 计算机科学与工程
方程。5。了解相关,回归,力矩,偏度以及峰度和曲线拟合的概念。模块1:拉普拉斯变换:(8小时)拉普拉斯变换的定义,存在定理,衍生物和积分的拉普拉斯变换,初始和最终值定理,单位步长函数,diracdelta函数,dirac-delta函数,laplace的周期性函数,周期性拉普拉斯转换,互惠变换,卷积变换,互惠定理,solude for solve lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal areviations lineal lineal areviations lineal lineal areviations。模块2:傅立叶变换:(8小时)傅立叶积分,正弦和余弦积分,傅立叶积分,傅立叶变换,逆傅里叶式扭转,卷积定理,傅立叶定理,傅立叶正弦和余弦变换,傅立叶变换的应用到简单的一维热传输方程。模块3:代数和超验方程和插值的解决方案:(8小时)数量及其准确性,代数和先验方程的解决方案:分配方法,迭代方法,Newton-Raphson方法和Regula-Falsi方法。这些方法的收敛速率(没有证据),插值:有限差异,操作员之间的关系,使用牛顿的前向和后差公式进行插值,与不平等间隔的插值:牛顿的分裂差异和Lagrange的公式。


定量obata的定理
几何分析中的核心主题之一是域的几何形状(在可能的弯曲空间中)与定义的拉普拉斯词的光谱特性之间的深厚联系。本文重点介绍了拉普拉斯的第一个特征值λ1(如果域有非空边界,则具有诺伊曼边界条件)。由于庞加莱( - 冬世界)不平等在分析中起着重要作用,并且由于第一个特征值的下限给出了庞加莱( - wirtinger)不平等中常数的上限,因此具有良好的下部较低估计为λ1,这是非常有用的。对于欧几里得空间中的领域,对拉普拉斯主义的第一个特征值(在Dirichlet或Neumann边界条件下)的经典估计可以追溯到雷利勋爵[1877],Faber [1923],Krahn [1925],Pólya和Pólya和Szeg˝o[1951],以及其他[1951],以及其他[1951]和Weinberger [1951],以及[1951]和Weinberger。对于弯曲空间,两个主要结果是由于Lichnerowicz [1958]和Obata [1962]:
教学大纲
方程。5。了解相关,回归,力矩,偏度以及峰度和曲线拟合的概念。模块1:拉普拉斯变换:(8小时)拉普拉斯变换的定义,存在定理,衍生物和积分的拉普拉斯变换,初始和最终值定理,单位步长函数,diracdelta函数,dirac-delta函数,laplace的周期性函数,周期性拉普拉斯转换,互惠变换,卷积变换,互惠定理,solude for solve lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal lineal areviations lineal lineal areviations lineal lineal areviations。模块2:傅立叶变换:(8小时)傅立叶积分,正弦和余弦积分,傅立叶积分,傅立叶变换,逆傅里叶式扭转,卷积定理,傅立叶定理,傅立叶正弦和余弦变换,傅立叶变换的应用到简单的一维热传输方程。模块3:代数和超验方程和插值的解决方案:(8小时)数量及其准确性,代数和先验方程的解决方案:分配方法,迭代方法,Newton-Raphson方法和Regula-Falsi方法。这些方法的收敛速率(没有证据),插值:有限差异,操作员之间的关系,使用牛顿的前向和后差公式进行插值,与不平等间隔的插值:牛顿的分裂差异和Lagrange的公式。模块4:数值差异和集成和解决方案:(8小时)

单位对偶四元数有向图、形成控制和一般加权有向图
我们研究有向图中的多智能体编队控制问题。相对配置用单位对偶四元数 (UDQ) 表示。我们将这种加权有向图称为单位对偶四元数有向图 (UDQDG)。我们证明,当且仅当对偶四元数拉普拉斯算子与底层有向图的无加权拉普拉斯算子相似时,所需的相对配置方案在 UDQDG 中是合理的或平衡的。提出了直接法和单位增益图法来解决一般单位加权有向图的平衡问题。然后,我们研究了一般非单位加权有向图的平衡问题。报告了 UDQDG 的数值实验。
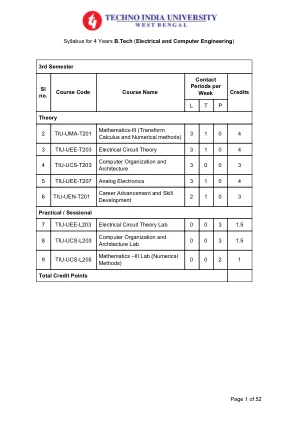
4 年制 B.Tech(电气和计算机)课程大纲...
详细课程大纲 第一单元:变换微积分拉普拉斯变换:拉普拉斯变换、性质、逆、卷积、用拉普拉斯变换求某些特殊积分、初值问题的解。傅里叶级数:周期函数、函数的傅里叶级数表示、半程级数、正弦和余弦级数、傅里叶积分公式、帕塞瓦尔恒等式。傅里叶变换:傅里叶变换、傅里叶正弦和余弦变换。线性、缩放、频移和时移性质。傅里叶变换的自互易性、卷积定理。应用于边界值问题。第二单元:数值方法近似和舍入误差、截断误差和泰勒级数。插值 - 牛顿前向、后向、拉格朗日除差。数值积分 - 梯形、辛普森 1/3。通过二分法、迭代法、牛顿-拉夫森法、雷古拉-法尔西法确定多项式和超越方程的根。通过高斯消元法和高斯-西德尔迭代法求解线性联立线性代数方程。曲线拟合-线性和非线性回归分析。通过欧拉法、修正欧拉法、龙格-库塔法和预测-校正法求解初值问题。
Zhang, Y., Valsecchi, M., Gegenfurtner, KR, Chen, J. (2023)。拉普拉斯参考是稳态视觉诱发电位的最佳选择。JOURNAL OF N
Zhang, Y., Valsecchi, M., Gegenfurtner, KR, Chen, J. (2023)。拉普拉斯参考是稳态视觉诱发电位的最佳选择。JOURNAL OF NEUROPHYSIOLOGY,130(3),557-568 [10.1152/jn.00469.2022]。

通过光谱扩散的图生成
在本文中,我们提出了Grasp,这是一种基于1)图拉普拉斯矩阵的光谱分解位置的新型图生成模型和2)扩散过程。具体来说,我们建议使用剥离模型对特征向量和特征值进行采样,从中我们可以从中重建图形拉普拉斯和邻接矩阵。我们的突变不变模型还可以通过将它们连接到每个节点的特征值来处理节点特征。使用拉普拉斯频谱使我们能够自然捕获图形的结构特征,并直接在节点空间中工作,同时避免限制其他方法的适用性。这是通过截断符号来实现的,正如我们在实验中所显示的那样,这会导致更快但准确的生成过程。在合成和现实世界图上进行的一系列实验表明,我们模型对最新的替代方案的优势。

一种基于...的 DTM 误差估计新方法
摘要:我们研究的主题是基于机载激光扫描 (ALS) 得出的数字地形模型 (DTM)。本文基于常用的统计数据分析了 DTM 的垂直精度,即平均误差和标准差,假设误差呈正态 (高斯) 分布。还测试了另一种方法,即所谓的稳健方法 (Höhle, Höhle 2009),其中中位数代替平均误差,标准化中位数绝对偏差 (NMAD) 代替标准差。本文提出了一种基于拉普拉斯函数的替代方法来描述概率密度函数,其中提出了拉普拉斯函数的参数用于 DTM 误差估计。测试区域位于意大利伊斯普拉联合研究中心附近; 2005 年收集了覆盖测试区域的原始 ALS 数据,并对其进行了处理以生成 DTM。精度分析基于 DTM 与原始 ALS 数据和现场高度测量的比较。从 ALS 数据计算出的 DTM 误差分布明显不正常,证实了文献中报告的其他结果。高斯分布函数大大高估了垂直 DTM 误差;然而,稳健方法低估了它们。拉普拉斯函数与误差直方图的匹配度最高,从该函数得出的精度参数可以被视为 DTM 精度评估的替代方法。1.简介

当 Transformer 遇见有向图
Transformer 最初是作为文本的序列到序列模型提出的,但如今已成为图像、音频、视频和无向图等多种模态的重要工具。然而,尽管 Transformer 可应用于源代码和逻辑电路等无处不在的领域,但用于有向图的 Transformer 却是一个令人惊讶的未被充分探索的课题。在这项工作中,我们提出了两种用于有向图的方向感知和结构感知的位置编码:(1)磁拉普拉斯算子的特征向量——组合拉普拉斯算子的方向感知泛化;(2)方向随机游走编码。从经验上讲,我们表明额外的方向性信息在各种下游任务中都很有用,包括排序网络的正确性测试和源代码理解。结合以数据流为中心的图构造,我们的模型在 Open Graph Benchmark Code2 上的表现比之前的最佳模型高出 14.7%。3