XiaoMi-AI文件搜索系统
World File Search System指挥部

TAC 攻击 1964 年 6 月 TAC 机组长 - 空战指挥部
我们目前的调查系统表面上揭示了事故和事件的原因。然而,整个指挥部的调查人员和审查机构往往集中甚至只将他们的努力局限于纠正显而易见的因素。结果,许多不太明显但同样重要的原因被忽视了。例如,当事故发生是因为某人违反了指令时,我们必须找出他违反指令的原因。其他人是否违反了指令并树立了危险的先例?指令措辞是否不当或含糊不清?涉事人员是否知道该指令?如果不知道,为什么?通过更认真地探究每起事故和事件的明确原因背后的模糊原因,然后采取迅速而明确的行动纠正每个薄弱环节,我们可以在每次调查中学到更多并取得更多成就。几乎无一例外,对每起事故或事件进行坚定而深入的检查都会发现值得积极改进的可疑领域,即使这些领域并非直接原因。每个主管都必须认识到这一宝贵的事故预防工具,并通过自己的努力独立扩大每次正式调查的范围。

美国陆军军工司令部、德特里克堡指挥部举行指挥权交接
6 月 22 日,在换届仪式上,即将上任的美国陆军传染病医学研究所指挥官亚伦·皮特尼上校从美国陆军医学研究与发展司令部兼德特里克堡指挥官安东尼·麦昆准将手中接受了部队旗。皮特尼上校接替康斯坦斯·詹金斯上校,詹金斯上校自 2021 年 6 月起担任该研究所所长,并将成为弗吉尼亚州福尔斯彻奇军事卫生系统治理外科医生的特别助理。皮特尼上校是西点军校毕业生,是一名陆军医生,最近担任弗吉尼亚州尤斯蒂斯堡美国陆军训练与条令司令部的指挥外科医生。他是普通儿科和儿科血液学/肿瘤学的认证医师。 2020 年至 2022 年,皮特尼上校指挥位于密苏里州伦纳德伍德堡的美国陆军医疗部活动。除了在全球疫情期间管理医院外,他的团队还提供了数千剂新冠疫苗,并进行了超过 12 万次新冠检测——这些医疗解决方案部分是通过美国陆军传染病医学研究院对 SARS-CoV-2 病毒的研究工作开发的。(照片由美国陆军传染病医学研究院公共事务部威廉·迪舍尔摄)
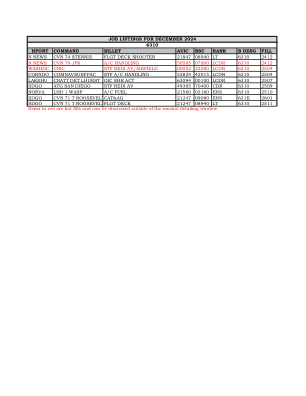
hport 指挥部 兵员 auic bsc 等级 b 设计填写 n 新闻 cvn...
HPORT COMMAND BILLET AUIC BSC Rank B DESG FILL N NEWS CVN 74 STENNIS FLGT DECK SHOOTER 21847 08940 LT 6310 2412 N NEWS CVN 79 JFK A/C HANDLING 50585 07800 LCDR 6310 2412 WASHDC CNIC STF REDI AV/机场 00052 32080 LCDR 6310 2504 CORNDO COMNAVSURFPAC STF 空调处理 53824 42015 LCDR 6310 2504 LAKEHU CNATT DET LHURST OIC SHR ACT 63094 00100 LCDR 6310 2507 SDGO ATG 圣地亚哥 STF 雷迪 AV 49365 70400 CDR 6310 2509 NORVA LHD 1 WASP A/C 燃料 21560 03160 ENS 6310 2510 SDGO CVN 71 T ROOSEVELTCAT&AG 21247 09080 ENS 631E 2601 SDGO CVN 71 T ROOSEVELTFLGT 甲板 21247 08940 LT 6310 2511 红色项目为热填充,可以在正常详细说明窗口之外进行讨论。

陆军军饷办公室进出处理
• 9 – 营房费率,含餐费扣除 • 0 – 仅限服务成员/营房费率,无餐费扣除 • 1 – 岛上有 1 名指挥部赞助的家属 • 2 – 岛上有 2 名指挥部赞助的家属 • 3 – 岛上有 3 名指挥部赞助的家属 • 4 – 岛上有 4 名指挥部赞助的家属 • 5 – 最多 5 名 + 岛上有指挥部赞助的家属

AMEDD 指挥选择 - 美国陆军
b. LTC/COL AMEDD 指挥部选拔通过集中选拔名单 (CSL) 委员会或提名小组程序进行。LTC/COL 军团/集中区 (AOC) 特定指挥部由人力资源司令部卫生服务部通过提名程序任命。指挥部选拔程序的目的是选出最有资格、拥有适当技能和经验、能够领导陆军专业人员、为全方位军事卫生行动做好准备并管理陆军资源的人。只有有限数量的 AMEDD 军官有机会担任指挥。未被选为指挥部的军官将继续在责任越来越大的任务中提供出色的服务,在作战部队和生成部队之间架起桥梁,并充当关键参谋部队指挥官的代言人。美国陆军预备役 (USAR) LTC/COL 指挥部通过适当级别的指挥部选拔委员会任命。陆军国民警卫队 (ARNG) LTC/COL 指挥部通过州副官长单位空缺委员会的决定任命。 2. AMEDD 指挥 LTC 和 COL 级别的 AMEDD 指挥机会分为以下几类:

AMEDD 命令选择
b. LTC/COL AMEDD 指挥部选拔通过集中选拔名单 (CSL) 委员会或提名小组程序进行。LTC/COL 军团/集中区 (AOC) 特定指挥部由人力资源司令部卫生服务部通过提名程序任命。指挥部选拔程序的目的是选出最有资格、拥有适当技能和经验、能够领导陆军专业人员、为全方位军事卫生行动做好准备并管理陆军资源的人。只有有限数量的 AMEDD 军官有机会担任指挥。未被选为指挥部的军官将继续在责任越来越大的任务中提供出色的服务,在作战部队和生成部队之间架起桥梁,并充当关键参谋部队指挥官的代言人。美国陆军预备役 (USAR) LTC/COL 指挥部通过适当级别的指挥部选拔委员会任命。陆军国民警卫队 (ARNG) LTC/COL 指挥部通过州副官长单位空缺委员会的决定任命。 2. AMEDD 指挥 LTC 和 COL 级别的 AMEDD 指挥机会分为以下几类:

BUMEDINST6300.24 护理人员职业压力控制...
转诊数量 MH 牧师 医疗 其他 9. 您的指挥部是否使用压力表 (SOM)? 10. CgOSC 指挥团队本季度开会了吗? 11. 您的指挥部是否提交了 CgOSC 季度报告? 12. 您的指挥部是否参加 CgOSC 季度 TELCON?

BUMEDINST6300.24 护理人员职业压力控制...
转诊数量 MH 牧师 医疗 其他 9. 您的指挥部是否使用压力表 (SOM)? 10. CgOSC 指挥团队本季度开会了吗? 11. 您的指挥部是否提交了 CgOSC 季度报告? 12. 您的指挥部是否参加 CgOSC 季度 TELCON?
海军和海军陆战队部队健康保护司令部
usn.hampton-roads.navmcpubhlthcenpors.list.nmcphc-sponsor@health.mil。一旦您被指挥部认定为潜在收益,就会立即选择赞助商。指挥部赞助商协调员将在收到您的订单后与您联系,以确保您的潜在收益问卷已在 NSIPS 中完成。问卷完成后,指挥部赞助商协调员将为您分配最适合您需求的赞助商。