XiaoMi-AI文件搜索系统
World File Search System控制律

F-16 大攻角机动控制... - eucass
非线性动态逆是针对大迎角机动问题研究最多的非线性控制技术。非线性动态逆是一种基于系统动力学逆的反馈线性化方法 [1]。通常,飞机动力学可分为两类:慢速动力学和快速动力学,F-16 也不例外。慢速动力学对于固定翼飞机是相同的,可以使用风轴微分方程推导。另一方面,快速动力学对于每架飞机都是独一无二的,在推导飞机的快速动力学时必须包括空气动力学数据库。本文使用了基于 NASA 兰利和艾姆斯研究中心的 F-16 风洞试验结果的亚音速气动数据库 [1]。该数据库适用于 和每种飞行条件。因此,它是在大攻角区域测试新开发的控制律的合适平台。在 Simulink 环境中开发了 F-16 的 6 自由度数学模型。数学模型包括气动数据库、发动机模型、大气方程和运动方程 [3]、[4]。开发了平飞、爬升、下降和稳定平转飞行条件下的配平算法 [5]。此外,还基于小扰动理论推导出了线性化算法 [6]。为了比较非线性动态逆控制律和线性控制律的性能,设计了横向和纵向运动的线性控制增强系统。采用特征结构分配技术综合了线性控制律。纵向控制器是一种简单的迎角控制指令系统,使用 F-16 飞机的短周期动力学设计而成。横向控制器是一种侧滑和稳定轴滚转速率指令系统,使用 F-16 飞机的线性化横向稳定轴方程设计而成。线性控制器的设计过程最终根据高度和速度安排增益矩阵,以实现全包络有效飞行控制律。使用预定义的大迎角机动对线性和非线性飞行控制律进行了比较。这种机动被定义为快速且同时的俯仰和滚转运动。虽然拉起运动在迎角和之间变化,但滚转运动在倾斜角保持恒定。随着攻角的增大,纵向和侧向动力学无法分离,因此增益调度线性控制器和非线性动态逆控制器的机动能力变得重要。

扩展现实飞行模拟与控制实验室
耦合飞行动力学、空气力学和气动声学模拟 § 线性化、稳定性、降阶、控制 § 实时空气力学和声学 § 实时交互空气动力学 § 旋翼飞行器(直升机、倾转旋翼机等)§ 扑翼微型飞行器(昆虫、鸟类) 先进飞行控制系统 § 旋翼机飞行控制系统 § 主动降噪飞行控制律 § 主动旋翼振动飞行控制律 感知建模和飞行员提示方法 § 全身触觉反馈 § 多模态飞行员建模 § 自转/舰载着陆提示算法
航空伺服弹性飞行控制设计...
军用飞机武器系统的气动伺服弹性飞行控制系统设计的目的主要是优化给定控制律的前向路径和反馈结构。控制律参数(如增益、相位超前滤波器和陷波滤波器)涵盖了所有设想的飞机配置的全飞行包线中的所有条件,这些飞机配置携带外部导弹、外挂物、炸弹,所有可能的对称和非对称组合。在优化过程中得出的控制律增益和相位超前滤波器被认为与马赫数和飞行高度有关,而结构滤波器(即陷波滤波器)可能是所有飞行条件和大量外部外挂物配置组的变量或常数。描述了飞行控制系统开发的设计策略和程序,其中包括飞行动力学耦合系统的建模、代表性选定外部外挂物的结构动力学、执行器和传感器以及数字飞行控制系统的影响。展示了不同的示例,记录了设计过程。 FCS 陷波滤波器的设计基于飞机模型,该模型描述了耦合飞行动力学、飞行控制动力学以及在代表性外部存储配置的地面和飞行结构耦合测试中测得的结构动态行为。本文
电传飞行控制系统的设计
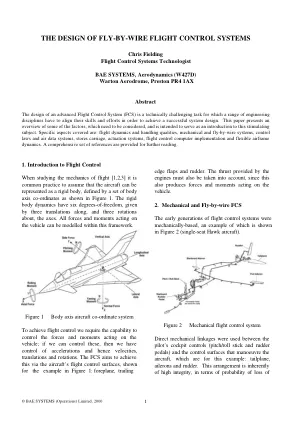
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。
电传飞行控制系统的设计
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。

使用... 开发飞行控制系统
为了简化调试,还实现了例程 off()。在调试模式下,可以通过 shell 输入“off”停止实时任务。函数 Controllaws() 由几个具有不同速率的定律组成。我们以 100 Hz 的速率计算控制增强系统,以 33.3 Hz 的速率计算自动驾驶定律和其他参数。为了提高运行效率,使用内部计数器而不是任务来调度这些定律。控制律通常由求和块、0 阶块、1 阶块、2 阶块、积分块、淡出块、死区块和饱和块组成。在我们的系统中,控制律块由 C++ 类实现。Tustin 变换具有叠加特性,因此软件可以按框图顺序处理控制律。为了简化系统调试,对于传感器输入和其他参数,使用浮点而不是整数作为数据类型;对于传感器输入,使用电压而不是实际物理值作为值。该软件是用 C++ 语言编写的。C++ 比 C 具有更多优势,例如封装和覆盖。有时,这会导致可靠性问题。在飞行控制应用中,应认真考虑这一点。我们的解决方案是:1)在实时任务运行之前创建所有对象; 2)在 IF-BIT 例程中检查系统健康状况。

基于差分平坦度的双端口双向超级电容器转换器控制策略,适用于氢能移动应用
摘要:本文重点介绍一种应用于交通系统的原始控制方法,该系统包括聚合物电解质膜燃料电池 (PEMFC) 作为主要能源,超级电容器 (SC) 作为储能备用。为了将超级电容器与嵌入式网络的直流总线连接起来,使用了双端口双向 DC-DC 转换器。为了控制系统并确保其稳定性,通过采用微分平坦算法的非线性控制方法开发了网络的降阶数学模型,这是一种有吸引力且有效的解决方案,通过克服交通系统电力电子网络中普遍遇到的动态问题来使系统稳定。系统控制的设计和调整与平衡点无关,在该平衡点上,所提出的控制律考虑了 PEMFC 主电源、超级电容器储能装置和负载之间的相互作用。除此之外,还实现了负载功率抑制的高动态性,这是本文的主要贡献。为了验证所开发控制律的有效性,在实验室中实现了小型实验测试台,并在 dSPACE 1103 控制器板上实现了控制律。实验测试使用 1 kW PEMFC 源和 250 F 32 V SC 模块作为储能备份进行。最后,根据在驾驶循环中测量的实际实验结果验证了所提出的控制策略的性能,包括电动模式、骑行和再生制动模式。
带有胶片采集袋系统的航天器的动力学和 FNTSM 控制
针对空间碎片问题,本文设计了一种薄膜捕获袋系统。与空间绳网相比,薄膜捕获袋具有更高的柔性和可靠性。薄膜捕获袋系统中含有许多柔性结构,在运动过程中易发生较大的变形和振动,这些变形对服务航天器造成较大的扰动,需要建立准确的刚柔耦合动力学模型对扰动进行定量分析。首先,采用高阶绝对节点坐标公式建立薄膜动力学模型;其次,采用快速非奇异终端滑模控制器和固定时间膨胀观测器(FxESO)设计姿态跟踪控制律;最后,结合动力学和控制原理,建立了带有薄膜捕获袋系统的航天器虚拟样机。仿真结果表明,与ABAQUS有限元分析相比,高阶绝对节点坐标公式单元具有更好的收敛性;同时,该动力学模型模拟了航天器机动过程中大型柔性结构的变形和振动状态,FxESO可以估计并补偿复杂的扰动。快速非奇异终端滑模+FxESO控制律下的误差收敛速度比非奇异终端滑模+扩展观测器控制律更快,最终航天器姿态跟踪误差约为10 −4,证明了该控制器的有效性。

3DEXPERIENCE 平台上的系统工程 - UAS 使用 ......
图 12.混合多旋翼飞行器概览 - 固定翼稳定控制律 已开发了两个附加控制律:1.改进的偏航控制。在传统的多旋翼飞行器上,偏航控制是通过增加沿预期偏航旋转方向相反的发动机转速并同时降低相反发动机转速来产生偏航轴扭矩来实现的,以使飞行器保持恒定的高度。但在大型多旋翼飞行器上,螺旋桨扭矩可能不足,导致控制和响应迟缓。由于拟议的 VTOL 设计的两个后置发动机可以单独倾斜,因此通过稍微向相反方向倾斜发动机可以提高偏航响应能力(图 13)。CATIA 系统模拟表明,±10° 倾斜范围可使偏航率加倍,同时还能提高偏航启动/停止响应能力。
四路数字飞行控制系统评估
四重 DFCS 架构 RDFCS 设施设置 保证方法的互补性 多级测试基础 数字飞行系统生命周期架构 设计任务 增强型电传操纵控制律 基线系统架构 通道逻辑 转换图 同步谓词/转换网络 谓词/转换网络细节 谓词/转换网络 模拟输出 顶层软件控制图 DFCS 可靠性框图 飞机模拟框图 托盘化 DFCS 控制律框图 免费 RSS 飞机时间历史软件控制流程图 增强型 RSS 飞机时间历史多级测试 收尾自动测试方案 正常通道同步时间历史启动通道同步时间历史稳定性无俯仰速率增强响应稳定性无攻角增强响应