XiaoMi-AI文件搜索系统
World File Search System控制站

Ikhana:支持长期地球科学任务的 NASA UAS
NASA Ikhana 无人机 (UAV) 是通用原子航空系统公司 (加利福尼亚州圣地亚哥) MQ-9 Predator-B 的改进版,用于支持 NASA 科学任务理事会以及通过合作伙伴关系与其他政府机构和大学开展地球科学任务。它可以在航空电子设备舱和外部吊舱中携带超过 2000 磅的实验有效载荷,并且能够在 40,000 英尺以上的高度执行超过 24 小时的任务。该飞机由移动地面控制站 (GCS) 远程驾驶,该控制站设计为可通过空中、陆地或海上部署。机载支持功能包括仪表系统和机载研究测试系统 (ARTS)。Ikhana 项目将于 2007 年初完成 GCS 开发、科学支持系统集成、外部吊舱集成和飞行许可以及操作人员培训。目前计划于 2007 年夏季进行大面积遥感任务。关键词:Predator-B、地球科学平台、高空长航时 (HALE)、Ikhana、UAS、UAV。

提交论文以纳入 ASTRO 2008 会议录的作者须知
(b) Presagis Canada Inc. 许多标准组织(如 FAA、NASA 和军事机构)都发布了一套全面的关于无人机 (UAV) 地面控制站 (GCS) 设计的人为因素指南和标准。然而,GCS 设计师发现很难将所有这些标准整合到他们的设计中,因为很难找到适用于他们工作的特定文档。因此,大多数 GCS 设计师只关注过去的设计趋势和飞行员工作量评估结果等因素。除此之外,与传统的飞机驾驶舱设计师不同,GCS 设计师不一定必须遵循一套特定的概念和技术规则;一些组织甚至已经开始探索使用虚拟现实和增强现实设备(如 Oculus Rift、Microsoft Hololens 等)来构建他们的控制站。这些灵活性和自由度是 GCS 设计最近呈指数级增长的主要原因。然而,它们在整合人为因素标准方面也带来了巨大的挑战。这项研究工作重点是创建符合人为因素的设计和评估 (HFCDE),该设计和评估可用于根据设计师遵循适用的人为因素指南和标准的程度来设计和评估 GCS。研究的第一阶段集中于设计和评估使用商用现货构建的新 GCS

milstar 概况介绍 - 国防部
Milstar 系统由地球同步轨道上的多颗卫星组成。Milstar 可在南北极之间提供 24 小时不间断的全球覆盖。Milstar 系统由三个部分组成:空间(卫星)、地面(任务控制和相关通信链路)和终端(用户部分)。这些部分将使用低数据速率 (LDR) 和中数据速率 (MDR) 波形以指定的数据速率提供通信,速率范围从 75 bps 到大约 1.5 Mbps。空间部分由在轨卫星系统组成,利用交联通信实现卫星间通信。任务控制部分控制在轨卫星,监测飞行器健康状况,并提供通信系统规划和监测。该部分具有很高的生存能力,既有固定控制站,也有移动控制站。系统上行链路和交联链路将在极高频率范围内运行。终端部分包括所有服务使用的固定和地面移动终端、船舶和潜艇终端以及机载终端。空间系统司令部(SSC)负责采购空间和地面部分以及空间部队终端部分。

提高无人机系统人机地面控制性能
摘要:无人驾驶航空系统(通常称为无人机)的使用如今正在迅速增长。可以从使用无人机机队和相关的人机界面中受益的应用程序正在涌现,以确保更好的性能和可靠性。特别是,无人机机队可以成为监控广阔区域并将相关信息传输到地面控制站的宝贵工具。我们为地面控制站提供了一种人机界面,用于在协作环境中由多个操作员组成的团队远程操作无人机机队。在这种协作环境中,界面设计的主要挑战是最大限度地提高团队态势感知能力,将重点从单个操作员转移到整个团队决策者。我们特别感兴趣的是测试以下假设:共享显示器可能会提高团队态势感知能力,从而提高整体性能。我们提出的实验研究表明,共享和非共享显示器之间的性能没有差异。然而,在发生意外事件的试验中,使用共享显示器的团队保持了良好的表现,而使用非共享显示器的团队表现下降。特别是在发生意外情况时,操作员能够安全地将更多无人机带回家,保持更高水平的团队态势感知。
为直升机启用基于条件的维护
设计用于确保在靠近人口稠密地区的无人试飞期间的安全 手动启动和关闭发动机(由飞行员) 从 GCS(地面控制站)启动自动起飞和降落 在 GCS 输入有限速度的情况下自动悬停飞行 自动和自主执行飞行计划 在系统性能下降时自主反应 通过 GCS 更改飞行计划 外部负载

当前挑战和未来机遇......
许多可用的 UAS 可以携带多个传感器有效载荷,从而实现通信情报和电子情报 (COMINT 和 ELINT)、通信中继和雷达系统的组合。无人驾驶车辆使用直接视线数据链路或利用卫星连接的超视线 (BLOS) 链路与地面控制站通信。这种多模式能力允许进行广域搜索和识别其他技术可能无法看到的目标,并可以为载人巡逻艇提供直接支持。

机场 - 航站楼导航系统
AVT 0500-1900 HN:根据预定的商业航班调整航班时刻表。在上述时间之外,可在着陆后应要求提供,最长响应时间为 2 小时 04 95 22 79 81。付款方式: - 燃油卡:BP 卡、美国政府航空卡, - 银行卡:Visa、Eurocard、Mastercard, - 现金(欧元):每次送货最多 750 欧元(含税), - 支票:无。燃料:100LL-JET A1/TR0。润滑剂:无 修理:商业航空地面处理:联系方式:法航: 04 95 23 56 67。电子邮件:mail.ops.aja@airfrance.fr Casavia: 04 95 23 56 78,电子邮件:casavia.aja@wanadoo.fr 运营控制站 (PCE)::04 95 23 56 19 - 电子邮件:pce1@sudcorse.cci.fr。附加服务: Campo Services(飞机清洁和服务)::06 31 80 15 79 / 06 74 98 46 09 电子邮件:camposervices2a@gmail.com 通用和商务航空:PPR PN 48 HR 参见 VAC LFKJ Casavia(地勤助理)::04 95 23 56 11 - 电子邮件:ag.casavia@casavia.fr cy.myhandlingsoftware.com(商务航空)。 www.touchngo.fr(通用航空)运行控制站(PCE)::04 95 23 56 19 - 电子邮件:pce1@sudcorse.cci.f COM(VFR)
文章提高无人机系统中人类地面控制性能
摘要:无人驾驶航空系统(通常称为无人机)的使用如今正在迅速增长。可以从使用无人机机队和相关的人机界面中受益的应用程序正在涌现,以确保更好的性能和可靠性。特别是,无人机机队可以成为监控广阔区域并将相关信息传输到地面控制站的宝贵工具。我们为地面控制站提供了一种人机界面,用于在协作环境中由多个操作员组成的团队远程操作无人机机队。在这种协作环境中,界面设计的主要挑战是最大限度地提高团队态势感知能力,将重点从单个操作员转移到整个团队决策者。我们特别感兴趣的是测试以下假设:共享显示器可能会提高团队态势感知能力,从而提高整体性能。我们提出的实验研究表明,共享和非共享显示器之间的性能没有差异。然而,在发生意外事件的试验中,使用共享显示器的团队保持了良好的表现,而使用非共享显示器的团队表现下降。特别是在发生意外情况时,操作员能够安全地将更多无人机带回家,保持更高水平的团队态势感知。
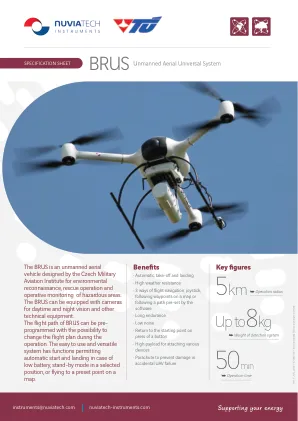
5公里 最多8公斤 - NUVIATech 仪器
产品描述 BRUS 是一种无人机系统,具有先进的导航和操作功能,由远程操作员通过无线连接实时控制。BRUS 无人机主要由碳复合材料制成。独特的设计允许 BRUS 折叠到最小体积,只需放下两个臂并拆卸底盘,所有这些都无需使用工具。BRUS 可以配备多种有效载荷 - 用于快照和视频的相机、热像仪和红外相机以及多个传感器,如辐射监测模块等。BRUS 系统由两部分组成;无人机部分和地面控制站,允许与无人机交互并从传感器接收数据。地面控制站配备了强大的高级导航软件。命令控制由操纵杆或单击触摸屏提供。BRUS 有两种版本:基本版 BRUS 和重型版 BRUS,后者具有更高的性能和有效载荷能力。两种版本均可配备视频模块(日光高清摄像头)或视频 + 红外模块(日光摄像头、红外摄像头和飞行过程中在摄像头之间切换的系统)。该系统设计便于运输和操作。三个臂无需使用任何工具即可折叠,以装入运输箱中,其尺寸允许在普通汽车后备箱中运输。

AG 365飞行手册
1。在视觉上检查以检查所有电动机,GPS和螺旋桨状况正确。2。检查所有螺旋桨状况良好,没有任何断裂或裂缝3。检查所有螺旋桨都用两个螺钉完好无损地安装在固定位置。4。检查地面控制站和RC控制器的费用。5。检查GPS已正确安装。检查是否没有损坏。6。检查着陆传感器已正确固定(TF02)。7。打开TX和GCS。(在TX中检查飞行模式,并在TX中打开游荡模式)8。检查电池电压。(全电荷电压:25.0V/batt。)9。将所有2个电池设置在无人机中并拧紧电池带10。展开所有武器并拧紧关节。11。正确卸下螺旋桨守卫并正确展开所有螺旋桨。12。将地面控制站连接到无人机。13。检查GC中的所有参数。(电池电压,HDOP,SAT计数等)14。仔细计划您的任务并将任务写给无人机。15。检查有效载荷已固定,罐盖关闭并锁定。16。确保没有潜在的安全危害或无人机半径范围内的人。17。检查环境温度需要小于50度