XiaoMi-AI文件搜索系统
World File Search System操作安全

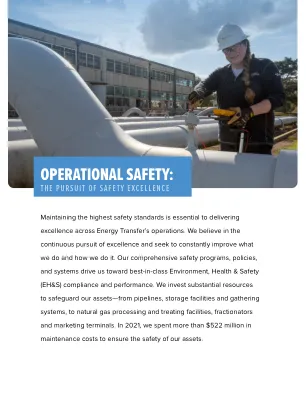
操作安全
简介。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>3 div>
操作安全 | 能量转移
我们的 EH&S 和组织卓越 (OE) 计划旨在促进工程、运营、维护和施工活动中的持续改进文化。这些计划包含了我们的员工和承包商在持续改进方面遵守的一套集体态度、价值观、规范、信念和实践。我们通过关注协作、公共和个人安全以及环境保护来培养积极的文化。OE 计划强调了促进持续改进的五大支柱: • 主动识别和管理风险并促进经验教训的分享 • 以环保和符合法规的方式安全地执行工作 • 定期评估项目、工作和任务以确保预期的结果和绩效 • 迅速采取行动并承担责任,鼓励各级领导 • 通过激励和培育变革、鼓励对话和确定改进来持续改进
JP 3-13.3,操作安全
2020 年 10 月 28 日 — JP 3-11,化学、生物、放射和核环境中的行动。o. JP 3-12,网络空间行动。p. JP 3-13,信息行动...
钻井操作安全案例:解释性指南
•简介概述了文件的范围和目的,涵盖安全案件的设施,批准和托管详细信息的立法,主要标准和实践守则,有关安全案件和其他行政要求的通信的地址(第3.1节)。•操作说明提供了该设施,其功能和控制系统的简洁概述(第3.2节)。•安全管理系统(SMS)提供了对维护设施和工人安全的管理系统的详细说明。这包括安全性关键要素(SCE)的绩效标准,并支持正式安全评估(FSA)的发现(第3.3节)。•正式的安全评估提供了对设施的风险管理方法的详细说明,风险评估咨询的摘要,已确定的重大事故事件的详细信息(MAES),降低风险SFAIRP和BOWTIE图表(第3.4节)。•紧急响应计划提供了设施的ERP的详细说明,包括ERP符合WHS Pageo法规的证据(第3.5节)
客舱操作安全最佳实践指南第 3 版
免责声明。本出版物中包含的信息会根据不断变化的政府要求和法规不断审查。任何订户或其他读者都不应在未参考适用法律和法规和/或未征求适当的专业建议的情况下根据任何此类信息采取行动。尽管已尽一切努力确保准确性,但国际航空运输协会对因错误、遗漏、误印或误解本出版物内容而造成的任何损失或损害概不负责。此外,国际航空运输协会明确表示,对于任何个人或实体(无论是否购买本出版物)根据本出版物的内容所做或不做的事情以及由此造成的后果,国际航空运输协会概不负责。

确保 NISQ 量子计算机中的重置操作安全
安全重置操作可以成为一种支持技术,允许不同用户或同一用户的不同量子程序共享量子计算机。安全重置操作可以允许在每个用户或程序之间重置量子计算机的量子位子集,以便擦除它们的状态,新程序或用户可以使用这些量子位,同时继续对其他量子位进行计算。今天,擦除量子位状态的主要方法是全系统擦除,这可以同时有效地重置所有量子位。例如,在当今 IBM 的超导量子比特机中,全系统擦除需要长达 1000 𝜇 s,并且会完全擦除系统中的所有信息。但是,使用全系统擦除时,无法仅清除几个量子位并将其分配给新用户或程序,所有内容都必须同时擦除。安全重置操作可以只重置一部分量子位,并且可以建立在现有的(不安全)重置操作之上,例如 IBM 的超导量子比特机。(不安全)重置操作现已可用,可用于在 10 𝜇 s 到 1 𝜇 s 数量级的时间内重置量子位的状态。因此,重置操作比整个系统擦除快得多。然而,正如这项工作所证明的,今天有可能在(不安全的)重置操作中泄露一些信息,因为它不能完美地重置可能在同一量子位上顺序调度的两个用户或程序之间的量子位状态。此外,还可以观察到类似串扰的效应,其中一个量子位的重置行为可以从相邻的量子位推断出来。这项工作分析了现有的(不安全的)重置操作,以了解如何在其基础上构建安全的重置操作。然后,这项工作描述了所提出的安全重置操作的设计、实施和评估,该操作可以在不泄露信息的情况下重置量子位,同时比整个系统擦除快 300 倍左右。
NTTP 3-13.3,作战安全 - 海军信息部队
图 D-1. 评估时间表示例 ...................................................................................................................... D-1 图 D-2. 操作安全简介示例:封面 ...................................................................................................... D-2 图 D-3. 操作安全简介示例:概述 ...................................................................................................... D-2 图 D-4. 操作安全简介示例:目的 ...................................................................................................... D-3 图 D-5. 操作安全简介示例:目标 ...................................................................................................... D-3 图 D-6. 操作安全简介示例:团队组成 ...................................................................................... D-4 图 D-7. 操作安全简介示例:方法 ...................................................................................................... D-4 图 D-8. 操作安全简介示例:基本规则 ............................................................................................. D-5 图 D-9. 操作安全简介示例:问题/讨论 ............................................................................................. D-5 图 D-10. 政策审查清单示例 ............................................................................................................. D-6 图 D-11.观察清单示例 ................................................................................................................ D-7 图 D-12. 访谈问题示例 ....
人为因素考试问题库答案键
程序(ASAP),飞行运营质量保证(FOQA)和线路操作安全审计(LOSA) - 被描述为“机组人员在说什么”(ASAP),“飞机在说什么”(FOQA)(FOQA),以及“驾驶员墙上的飞行器上的苍蝇会说什么”(LOSA)(LOSA)(LOSA)。
自主蓝图 — 从当今的小型 UAS 操作开始...
• 利用测试和认证流程,根据预期的操作和设计领域确保适当的设计严谨性和操作安全目标 • 利用现有军事应用的测试和自我认证 • 成熟的稳健事件响应和管理计划,包括系统级数据收集和操作反馈,可用于不断提高设计弹性和操作安全性 • 成熟的自主 UAS 操作安全管理系统 (SMS) 程序 • 随着法规 — BVLOS、UTM — 的出台,扩展 sUAS/低风险自主操作 • 实施航空安全事件和事故报告系统以收集 UAS 数据 • 收集完全由机载飞行员依赖但在出现非正常性能时不是最终权威的任何自主能力的经验(由于认证挑战,这些可能先于没有飞行员在场的应用程序)
创新的飞控系统架构
I.1 飞行控制:作用和要求 ................................................. . ................................................. .................6 I.1.1 作用、发展和基本定义 ................................................ .................................................. ...................6 I.1.1.1 飞行控制系统的作用 ...................................... …………………………………… ................................................6 I.1.1.2 进展情况:来自各方机械到电传飞行以及未来趋势................................................ ....................................6 I.1.1.3基本定义................................................................ ……………………………… ……………………………… ........7 I.1.2 CDVE 系统要满足的所有要求......................................... ......................................................8 I.1.2。 1 操作安全........................................................................ …………………………………… .................................................8 1) 基本概念................................. ……………………………… ……………………………… ................8 2) 属性................................. …………………………………… …………………………………… ......8 3) 意思 ...................................................... …………………………………… …………………………分区>