XiaoMi-AI文件搜索系统
World File Search System操作


操作策略
加沙的可怕人道主义背景导致加沙内部的大规模流离失所,向南运动,靠近埃及边界。拉法南部加沙南部的过境点,于10月9日至10日袭击。The International Federation of the Red Cross and Red Crescent Societies (IFRC), the International Committee of the Red Cross (ICRC), with the leadership of the Egyptian Red Crescent Society (ERCS), are setting up logistics hubs in strategic locations, including near Rafah Crossing, to offer logistical and administrative support for the reception of international shipments via Egypt and deliver them to the PRCS at the Rafah Border crossing.ERCS是唯一可以访问北西奈的组织,并且已经通过其分支机构管理该地区的运营和项目。
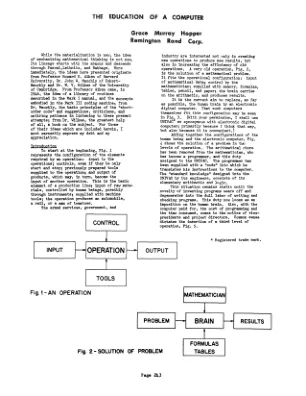
〜-'〜操作〜- 〜Brain〜-〜
程序员可以返回成为数学家。他提供了子例程目录。他不再需要具有可用的公式或基本功能表。他甚至不需要知道计算机使用的特定指令代码。他只需要使用目录就其问题提供信息。根据数学家提供的信息,在“ A型汇编例程”的控制下?使用子例程及其自己的构造代码?生产一个程序。此程序〜反过来又通过输入数据的计算指导Univac,并产生所需的结果。已经大大减少了耗时和错误来源。如果图书馆库存充足〜编程已减少到几个小时?而不是几周。该程序不再受到转录错误或未经测试的例程的约束。计算机信息的规格?目录〜编译例程?和子例程将在将另一个级别添加到框图之后。如图5架数学家仍然必须执行所有数学操作?降级为Univac编程和计算操作。但是〜数学家提供的计算机信息不再处理数值。它以符号形式处理变量和常数


操作分析师
•为国家和地区管理团队提供整体项目管理,计划和监视可交付成果,以确保及时和质量交付工作计划。s/她必须保持高度的酌处权和专业精神。•通过提供行业背景数据,公司分析,比较器分析,行业研究等,帮助支持所有行业群体的管道开发。•按照国家经理和管理团队指示的数据/研究和所有运营/资源支持工作的“进入”人。•从内部和外部数据库中提取数据,以各种格式操纵并呈现数据以高度准确性和一致性,并定期更新/维护信息。•准备文件和报告以向各种受众提供信息,包括:国家战略提交,世界银行国家伙伴关系框架文件的部分,投入到业务计划,工作计划协议。•审查和筛选相关文档/报告,以与策略文件一致。•为生产的工作产品以及可能按照国家经理指示的作业提供研究/分析支持。
操作GRITTOOL ...
个人发展就是投资自己,以实现最高效率和效益。这是我们对每位飞行员的愿景。安装影响者负责传递这些信息,并激励飞行员努力实现个人和职业的进步。致力于个人发展是实现个人成就的关键一步。