XiaoMi-AI文件搜索系统
World File Search System教学的
单元1多媒体 - 机构Sophitorium组
•这些称为多媒体的音频或声音元素。•言语也是教学的理想方法。•音频是模拟和数字类型的。•模拟音频或声音是指原始声音信号。•计算机以数字形式存储声音。因此,多媒体应用程序中使用的声音是数字音频。
合作教学:一种综合方法
● 理解共同规划对于共同教学的成功至关重要 ● 解释如何有效和高效地共同规划 ● 描述共同教师使用的各种类型的共同规划 ● 共同规划使用共同教学模式的课程,为所有学生提供平等的机会

Domande SS_PP_91 SS_PP_260 SS_PP_93
通过采用教学的观点,玛莎·努斯鲍姆(Martha Nussbaum)指出:“有必要培养学生的内在目光,这意味着对信件和艺术的教育,使学生与性别问题,繁殖,种族,种族”接触。”这导致对维度的理解:

David Foster-社会科学与公共政策学院
高等教育教学和学习的荣誉和奖项证书(2021年):由UC Berkeley教学和资源中心授予教学会议,教育学课程,六个关于教学的教学讲习班,教师的课堂观察,样本原始教学大纲和中期学教学评估

计算空间中机器人操纵器的离线直接教学
本文提出了一种使用增强和虚拟现实技术的机器人教学方法。机器人教学对于机器人完成工业生产的几项任务至关重要。尽管有各种方法可以执行机器人操纵的运动计划,但仍需要机器人教学才能进行精确和可靠性。在线教学,其中物理机器人在真实空间中移动以获得所需的运动,并且由于其易于性和可靠性而被广泛执行。但是,需要实际的机器人移动。相比之下,可以在计算空间中完全实现局部教学,并且需要将机器人的周围构造为计算机图形模型。此外,planar显示器不提供3D场景上的精通信息。我们提出的方法可以作为频道教学的使用,但是操作员可以使用头部安装的设备和虚拟3D空间中的指定控制器来直观地操纵机器人。我们通过增强和虚拟现实技术展示了机器人教学的两种方法,并显示了一些实验结果。
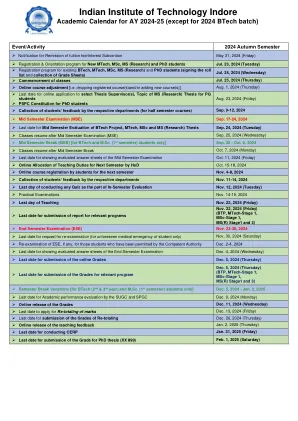
AY 2024-25的学术日历(...
➢教学的最后一天,2025年5月1日(星期四)➢结束学期考试(ESE),5月3日至10日,2025年5月3日至10日➢对ESE(如果有的话)重新检查ESE(如果有的话)。 5-9,2025年5月13日(星期二)(星期二)
教学卓越:2030战略愿景
我们知道麦科文学院提供的课程是有需求的——无论是下一代的专上学生、终身学习者、工商企业还是社区。满足这种需求意味着要有战略眼光。我们不愿意牺牲对卓越教学的承诺。因此,单纯为了增长而增长显然是不可能的。

在机器人控制中采用视觉语言模型来实现象征性动作有什么重要的?
摘要 - 视觉语言模型(VLMS)在理解图像和文本方面具有出色的熟练程度,并基于此类输入生成文本输出,因为它们在网络规模的数据集上进行了培训。它们的机器人应用潜力特别有趣。一个值得注意的例子是RT-2,它是一个能够从给定指令中以文本格式代表的低级操作的系统,以及一系列历史动作和图像观察。为了刺激该领域的进一步研究,我们引入了用于在基于教学的机器人控制中使用VLM的开源实现。此实现支持各种VLM架构,并促进了新模型的直接集成。我们使用我们的框架来训练多个VLM并在物理机器人上进行评估。结果验证了我们框架的实际功效,从而为增强基于教学的机器人控制系统的理解和能力铺平了道路。代码可在以下网址提供:https://github.com/nicolinho/robobovlm。