XiaoMi-AI文件搜索系统
World File Search System旋转器

使用可调参数的纳米孔测序信号数据
是一种在基因组学领域中广泛使用的技术。但是,目前缺乏从纳米孔测序设备创建模拟数据的有效工具,这些工具以时间序列的当前信号数据的形式测量DNA或RNA分子。在这里,我们介绍了Squigulator,这是一个快速而简单的工具,用于模拟逼真的纳米孔信号数据。s弹器采用参考基因组,转录组或读取序列,并生成相应的原始纳米孔信号数据。这与牛津纳米孔技术(ONT)和其他第三方工具的基本软件兼容,从而为纳米孔分析工作流的每个阶段提供了有用的基板,用于开发,测试,调试,验证和优化。用户可以使用模拟特定ONT协议或无噪声“理想”数据的预设参数生成数据,或者他们可以确定性地修改一系列实验变量和/或噪声参数以满足其需求。我们提供了一个简短的用途示例,创建了模拟数据,以模拟不同参数影响ONT基本和下游变体检测准确性的程度。此分析揭示了对ONT数据和基本算法的性质的新见解。我们为纳米孔社区提供了旋转器作为开源工具。
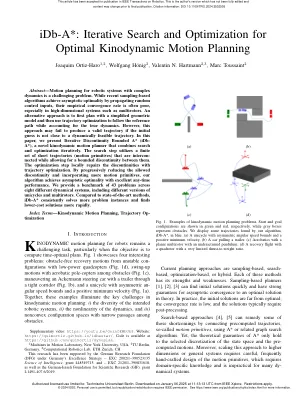
IDB-A 多级运动计划:光纤束配方
摘要 - 具有复杂动态的机器人系统的动态计划是一个具有挑战性的问题。最近基于抽样的算法通过传播随机控制输入来实现渐近最优性,但它们的经验收敛速率通常很差,尤其是在高维系统(如多电动器)中。另一种方法是使用简化的几何模型进行首先计划,然后使用轨迹优化来遵循参考路径,同时考虑真实动力学。但是,如果初始猜测不接近动态可行的轨迹,则此方法可能无法产生有效的轨迹。在本文中,我们提出了迭代的不连续性A*(IDB- a*),这是一种新型的运动动力运动计划者,可以迭代地结合搜索和优化。搜索步骤利用了有限的短轨迹(运动原语),这些轨迹是相互互连的,同时允许它们之间存在界限的不连续性。优化步骤在本地通过轨迹优化的不连续性进行了修复。通过逐步降低允许的不连续性并结合更多的运动原始性,我们的算法可实现渐近最优性,并在任何时候表现出色。我们提供了八个不同动力学系统的43个问题的基准,包括不同版本的独轮和多旋转器。与最先进的方法相比,IDB-A*始终如一地解决了更多的问题实例,并更快地发现了较低成本的解决方案。

3D印刷具有子波纤维尖端上带有子波长度的玻璃微观镜头
摘要:光纤尖端上功能材料和结构的集成使在微观磁镜中的各种应用(例如感应,成像和光学诱捕)中的各种应用。直接激光写作是一种3D打印技术,有望在纤维尖端上制造高级微光学结构。迄今为止,材料的选择仅限于基于有机聚合物的光蛋白师,因为现有的3D直接激光编写无机材料的方法涉及与光纤不兼容的高温处理。但是,有机聚合物的稳定性和透明度与无机玻璃的稳定性和透明度相当。在此,我们演示了3D直接激光写入无机玻璃,并在光纤尖端上具有亚波长度分辨率。我们展示了两种不同的打印模式,可分别启用实心二氧化硅玻璃结构(“统一模式”)和自组织的亚波长光栅(“纳米式模式”)。我们通过打印两个功能设备来说明方法的实用性:(1)折射率传感器,可以在近边缘波长下测量丙酮和甲醇的二进制混合物的索引,以及(2)紧凑型极化光束旋转器在全纤维系统中进行偏光控制和光束转向。通过将玻璃的优质材料与光纤的插头性质相结合,该方法可以在诸如纤维传感,光学微电机机电系统(MEMS)和量子光子学等领域中实现有希望的应用。关键字:直接激光写作,微结构纤维,3D玻璃,光纤感应,极化束分配器i

重要的微生物
清除和随后对人类废物的处理(废水)是任何社区的基本要求,居住在附近的居民。历史告诉我们,没有它,可能导致死亡的慢性疾病困扰着该地区。浪费人类(如人类)是许多类型的细菌的家园,当摄入时确实会弄乱胃肠道。最常见的两个包括大肠杆菌和沙门氏菌,在召回农产品时,新闻中听到的并不少见。这些细菌和其他微生物使用“废物”作为食物和栖息地的来源,同时将其分解为最稳定的形式。这些微生物包括细菌,原生动物,旋转器,水生蠕虫,真菌和藻类。废水处理采取了这种自然过程,增加了处理的体积,并加快了几周到几个小时所需的时间。在植物环境中,这种生物体的培养被称为活性污泥。活化的污泥必须维持生物类型的一定平衡,并保持有效工作的食物(废物)平衡。需要恒定测试和操纵变量以维持这种平衡。在活化污泥中发现的最常见的微生物类型是细菌。通过二元裂变繁殖(每个细胞分为两个细胞);对于某些生物来说,这可能每隔几分钟就会发生一次。相反,存在的细菌数量和所发生的治疗程度由存在或不存在的原生动物类型表明。更好地了解这一积累的速度是“废水处理厂的运作”,“每个人每天都消除了约2000亿大肠杆菌作为废物。”细菌被认为是活化污泥过程的主要工人,但太小,无法用光显微镜观察。

Hyo -Jung Jeong,PT,PhD,MS-物理治疗计划
在具有正向头部姿势的受试者中,针对颅尾比对和外部宫颈肌肉活动的颅颈屈曲运动。肌电学和运动机能学杂志,30,31-37。PMID:27261928。doi:10.1016/j.jelekin.2016.05.007 9。Kim,B.,Lee,J.,Jeong,H。,&Cynn,H。(2016)。 可以下枕下释放,然后进行颅骨颈屈曲运动改善肩部运动,疼痛和肌肉的肌肉活动范围,肩cap骨向上旋转器中有前姿势的受试者中的肩cap骨活动? 物理治疗韩国,23(2),57-66。 url:http://koreascience.or.kr/article/jako20161616553237220.Page 8。 Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。 各种耸立的练习可以改变肩cap骨向下旋转综合征的受试者中的肩c骨运动学和肩cap骨肌肉活动。 人类运动科学,45,119-129。 PMID:26625348。 doi:10.1016/j.humov.2015.11.016 7。 Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。 在患有和没有肩cap骨向下旋转综合征的受试者中左肩cap骨指数的可靠性。 运动中的物理疗法,19,1-6。 PMID:27134210。 doi:10.1016/j.ptsp.2015.07.002Kim,B.,Lee,J.,Jeong,H。,&Cynn,H。(2016)。可以下枕下释放,然后进行颅骨颈屈曲运动改善肩部运动,疼痛和肌肉的肌肉活动范围,肩cap骨向上旋转器中有前姿势的受试者中的肩cap骨活动?物理治疗韩国,23(2),57-66。url:http://koreascience.or.kr/article/jako20161616553237220.Page 8。Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。 各种耸立的练习可以改变肩cap骨向下旋转综合征的受试者中的肩c骨运动学和肩cap骨肌肉活动。 人类运动科学,45,119-129。 PMID:26625348。 doi:10.1016/j.humov.2015.11.016 7。 Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。 在患有和没有肩cap骨向下旋转综合征的受试者中左肩cap骨指数的可靠性。 运动中的物理疗法,19,1-6。 PMID:27134210。 doi:10.1016/j.ptsp.2015.07.002Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。各种耸立的练习可以改变肩cap骨向下旋转综合征的受试者中的肩c骨运动学和肩cap骨肌肉活动。人类运动科学,45,119-129。PMID:26625348。doi:10.1016/j.humov.2015.11.016 7。Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。 在患有和没有肩cap骨向下旋转综合征的受试者中左肩cap骨指数的可靠性。 运动中的物理疗法,19,1-6。 PMID:27134210。 doi:10.1016/j.ptsp.2015.07.002Lee,J.,Cynn,H.,Choi,W.,Jeong,H。,&Yoon,T。(2016)。在患有和没有肩cap骨向下旋转综合征的受试者中左肩cap骨指数的可靠性。运动中的物理疗法,19,1-6。PMID:27134210。doi:10.1016/j.ptsp.2015.07.002

在交互式模拟中可视化量子力学
摘要。Quantum Flytrap 的 Virtual Lab 是一个无代码的光学桌在线实验室,以交互和直观的方式呈现量子现象。它支持最多三个纠缠光子的实时模拟。用户可以使用拖放式图形界面放置典型的光学元件(例如分束器、偏振器、法拉第旋转器和探测器)。Virtual Lab 以两种模式运行。沙盒模式允许用户组合任意设置。Quantum Game 是 Virtual Lab 功能的入门,适合没有接触过量子力学的用户。我们介绍了纠缠态和纠缠度量的可视化表示。它包括 ket 符号的交互式可视化和量子算子的热图式可视化。这些量子可视化可以应用于任何离散量子系统,包括具有量子位和自旋链的量子电路。这些工具以开源 TypeScript 包的形式提供 - Quantum Tensors 和 BraKetVue。虚拟实验室可以探索量子物理的本质(状态演化、纠缠和测量)、模拟量子计算(例如 Deutsch-Jozsa 算法)、使用量子密码术(例如 Ekert 协议)、探索违反直觉的量子现象(例如量子隐形传态和违反贝尔不等式),以及重现历史实验(例如迈克尔逊-莫雷干涉仪)。© 作者。由 SPIE 根据 Creative Commons Attribution 4.0 International 许可证出版。分发或复制本作品的全部或部分内容需要完全注明原始出版物的出处,包括其 DOI。[DOI:10.1117/1.OE.61.8.081808]

使用环境DNA估计急性除草剂污染过程中的快速多样性变化
摘要全球淡水生态系统的生物多样性由于各种人为压力源(例如栖息地降解,入侵物种的引入和污染)而面临严重威胁。评估人类引起的环境压力源对人群和社区持久性的影响需要准确的生物多样性估计。虽然环境DNA(EDNA)的质量编码已成为一种有前途的工具,但其在捕获生物组织(社区,人口和特异性水平)跨生物多样性响应中的有效性仍有待研究。在这项研究中,我们通过对基于草甘膦除草剂除草剂除草剂除草剂脉冲进行对比的养分水平(孕育和雌激素)进行了两个月的中核实验,测试了EDNA Metabarcoding在评估水生浮游动物和昆虫群落快速变化方面的疗效。我们检查了治疗对社区组合,家庭丰富性和种内多样性的影响,并将我们的发现与通过显微镜方法获得的结果进行了比较。元编码揭示了与显微镜的部分一致的生态发现,表明其在评估社区快速变化方面的潜力。除草剂引起的社区组成的转变以及差异影响的浮游动物和昆虫家族的丰富度(昆虫的增加,以及甲壳动物和旋转器的减少),这表明对类群中除草剂的宽容梯度以及昆虫幼虫的潜在自上而下的调节,这可能抵消了昆虫的优势。最后,我们表明养分富集加剧了除草剂对种内多样性的负面影响,从而突出了人们对遗传培养的关注。我们的发现强调了淡水生态系统中对除草剂和营养富集的反应的复杂性。我们得出的结论是,Edna Metabarcoding不仅可以用来估计无脊椎动物群落的快速变化,而且还可以通过对生物组织不同规模的多样性动态和潜在的级联效应提供更广泛的观点来获得额外的价值。

开发燃气轮机高级设计
在各种技术领域中,对具有改善性能特征的零件和组件的需求,例如力量,耐磨性以及在侵略性环境中工作的能力正在不断提高。此类产品的空白的形状和尺寸应尽可能接近零件的几何参数。基于冲压,锻造,精确铸造或形成的传统技术在此类空白的生产中面临严重的限制,这是由于很大的困难满足了几何复杂性的要求,给定的准确性水平以及材料的服务分布和技术特征。最近,在全球范围内开发了渐进的技术过程,以高速喷洒液体合金作为颗粒或其他小颗粒并凝固它们,从而生产结构材料。随后,毛坯的形状和大小靠近成品部分是由它们产生的。这种粉末技术包括热等静力压力(髋关节)和添加剂技术的各种方法(AT)。目前,3D打印被广泛用于汽车,飞机和发动机生产等区域。这变得可能是可能的,因为3D打印完全满足了复杂金属零件生产的行业需求。燃气轮机发动机(GTE)零件是使用这些技术进行制造是合理的对象。髋关节长期以来一直广泛用于串行生产零件,例如涡轮盘合金的涡轮盘[1]。各种GTE零件已经在AT [8的帮助下都在制造。9]。该技术最有趣的应用是由由颗粒合金和铸造叶片制成的圆盘组成的一体式叶轮(Blisks)[2,3];功能级别磁盘,由不同尺寸或不同合金的颗粒组成[4-7];和其他类似的项目。例如,Avio Aero使用GE9X发动机的电子束烧结的钛合金制成的TND涡轮叶片的连续生产[10]。还产生了Leap1b发动机中心支撑的钛情况。燃烧室的一部分(发动机CFM International的Leap-1a,1B和1C,西门子的SGT-750燃气轮机燃烧器旋转器等)已经为连续生产做好了准备。确定其特性的主要GTE部件之一是涡轮机,在飞机操纵期间,在高静止的外部载荷和温度下运行。一些大零件,例如GTES中的压缩机轮和涡轮机,具有很大的质量,并且特别重要,因为它们的故障导致了整个发动机的非定位破坏。因此,GTE零件开发的主要任务之一是减轻体重,同时满足强制性强度可靠性要求。本文讨论了使用粉末技术创建GTE涡轮机轮的使用。
新闻稿
Louvain-la-neuve,比利时和Yardley,美国宾夕法尼亚州,10月29日 - IBA(IBA束应用S.A.,EuroNext S.A.,Euronext),粒子加速器技术的世界领导者,世界上全球领先的放射性药物生产解决方案和Jubilant radiopharmaime section the jubimapharmav的提供商在美国(美国),很高兴宣布签署合同,以安装五个Cyclone®Kiube180 Cyclotrons及相关设备的合同该合同将支持欢乐的放射线最初的5000万美元(USD)正电子发射断层扫描(PET)放射性药物制造网络扩展计划。这项投资,再加上IBA放射线解决方案设备的添加,将大大扩大欢乐的放射线疗法的能力,可以在美国范围内生产和分发符合CGMP符合CGMP的PET Radiotracers,并特别关注肿瘤学,泌尿外科,心脏病学和神经病学的护理领域。Cyclotrons将安装在欢乐的Radiopharma的宠物制造设施中,策略性地位于美国各地,将其宠物制造设施的总数提升到了9个。这五个位置中的每个位置都将配备IBA的Cyclone®Kiube180 Cyclotron,自挡和目标。Cyclone®Kiube是可用的最先进的环蛋白之一。它以其升级性,紧凑的设计,高效率以及生产各种放射性同位素的能力而闻名,使其非常适合研究和商业生产。第一张合同表明了IBA行业领先的放射线药物产品。Cyclone®Kiube非常适合生产各种PET放射性病,包括氟18,68,锆89,碳11等,用于诊断和监测各种疾病,包括癌症和神经系统疾病。Cyclone®Kiube和相关设备的典型价格范围是欧元两年半至500万欧元,具体取决于选项和配置。IBA Radiopharma Solutions总裁Charles Kumps评论说:“ IBA很自豪地与Jubilant Radiopharma签订了这一协议,以支持PET的扩展其RadioPharmaceuticals生产网络。我们的尖端解决方案和我们的专业知识,以整合所有必要的设备以使GMP完全符合GMP的放射性药房,将加速欢欣鼓舞的放射性药物在所有PET放射性同位素中的扩展,以推动我们在美国推进核医学。”欢欣鼓舞的首席执行官Harsher Singh表示:“与IBA合作并选择其高能量双光束式旋转器将使欢乐的放射线能够提高生产能力,并在高峰时段最需要的时候在美国各种宠物放射性疗法的患者为患者提供服务。”
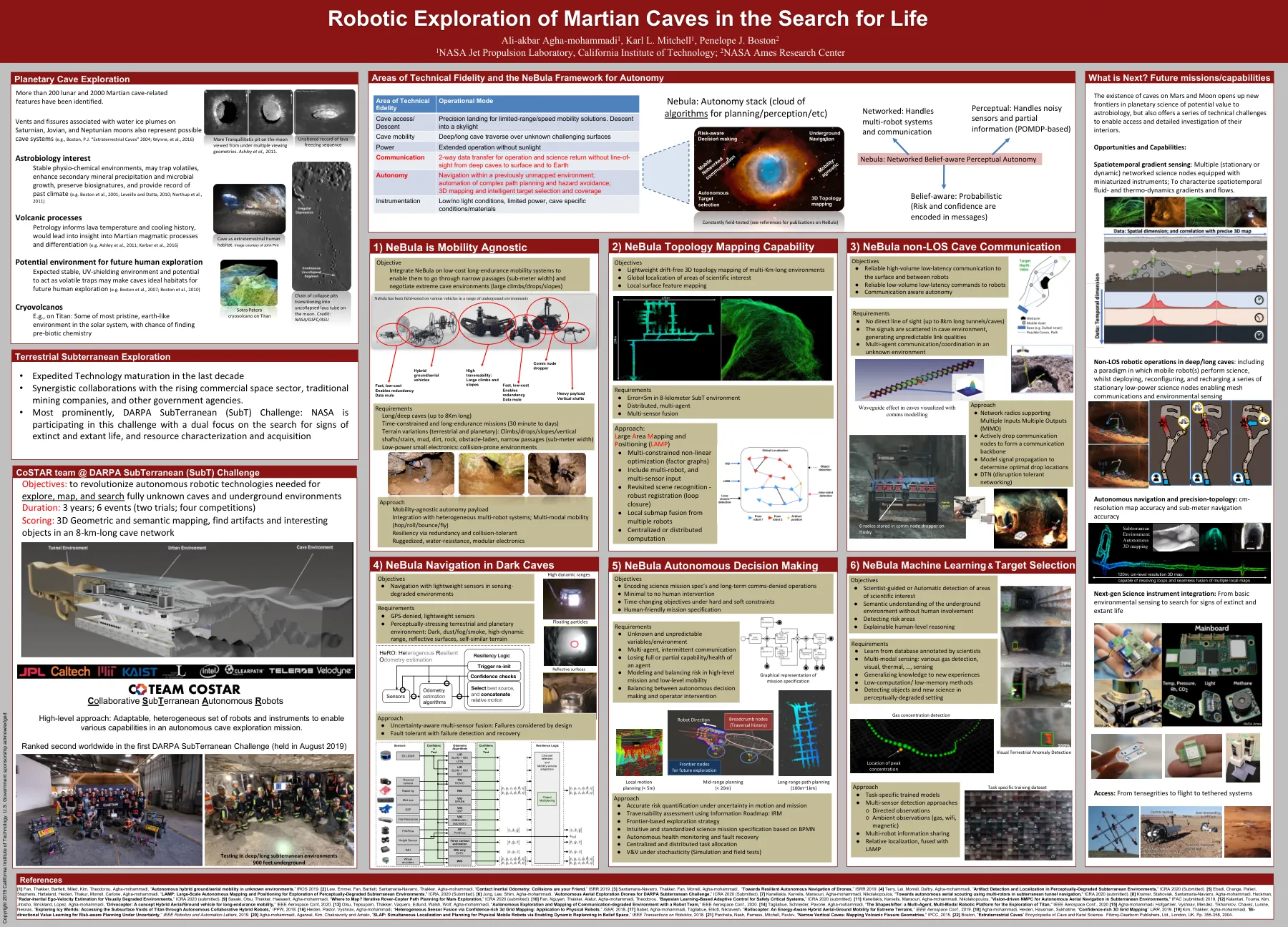
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。