XiaoMi-AI文件搜索系统
World File Search System无界

Infinicube:无界和可控的动态3D ...
我们在Finube中提出,这是一种可扩展的方法,用于生成具有高量和可控性的非边界动态3D驾驶场景。以前的场景生成方法遭受有限的尺度或缺乏生成序列的几何和表现一致性。在很重要的情况下,我们利用可扩展的3D表示和视频模型中的最新进步来实现大型动态场景生成,从而可以通过高清地图,车辆边界框和文本描述来实现灵活的控制。首先,我们构建了一个基于地图的基于地图的稀疏体3D生成模型,以释放其无限素素的能力。然后,我们通过一组精心签名的像素一致的指导缓冲液重新使用视频模型,并将其扎根于体素世界,从而综合了一致的外观。最后,我们提出了一种快速的前进方法,该方法使用体素和像素分支来将动态视频提升为动态的3D高斯,并具有控制 -

InstantsPlat:无界的稀疏视觉无姿势无姿势的高斯裂口在40秒内
虽然新颖的视图合成(NVS)在3D计算机视觉中取得了进步,但通常需要从密集的视点对摄像机内在和外部设备进行初始估计。这种预处理通常是通过结构 - 运动(SFM)管道来进行的,这是一种可以缓慢且不可靠的操作,尤其是在稀疏视图方案中,匹配的功能不足,无法进行准确的重建。In this work, we integrate the strengths of point-based representations (e.g., 3D Gaus- sian Splatting, 3D-GS) with end-to-end dense stereo mod- els (DUSt3R) to tackle the complex yet unresolved is- sues in NVS under unconstrained settings, which encom- passes pose-free and sparse view challenges.我们的框架工作,InstantsPlat,用3D-GS统一了密集的立体声先验,以构建稀疏场景的3D高斯大型场景 -

有限提出的群体的有界共同体-Iris
摘要。我们提供有界共同体的新计算:如果在所有正度程度上具有微不足道的真实系数的有界的共同体,则一组有限的无环。我们表明,存在一个有限产生的无界无环群的连续体,并构建了一个有限的无界无环群。另一方面,我们构建了一个有限生成的群体的连续体,其有限的共同体在大于或等于2的所有程度上具有无数的维度,并且有限地提出了一个。可计数的不符合性群体,但这些构成了第一个有限的/有限呈现的示例。最后,我们表明有界共同体的各种算法问题是不可决定的。
3。GSCC员工资料form_college网站(1)
1。“无界非零内部产品加密”中的理论计算机科学,第1000、2024、114548卷,ISSN 0304-3975 2。“无限制内部产品的多输入功能加密”

量子信息处理的数学导论
1 数学框架 5 1.1 希尔伯特空间. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 无界算子和谱测度. . . 13 1.3 量子理论的概率结构. . . . . 16 准备. . . . . . . . . . . 17 测量. . . . . . . . . . . . 19 概率. . . . . . . . . . . . . 20 可观测量和期望值. . . . . . 23 1.4 凸性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 凸集和极值点 . . . . . . . . . . . . . . . . . 25 状态混合 . . . . . . . . . . . . . . . . . . . 26 主化 . . . . . . . . . . . . . . . . . . . 27 凸泛函 . . . . . . . . . . . . . . . . . 29 熵. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 复合系统和简化系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Choi 矩阵 . ...

单位-5.pdf
我们开始SEC。5.2通过引入一种将两体系统减少到同等单体系统中的方法。这是一种简单的方法,您必须熟悉,因为本科生和学校(但是,它都构成了解决两体问题的重要组成部分。将两体系统减少到同等的单体系统可以导致更简单的运动方程式,从而更容易分析和理解系统的行为。sec。 5.3,您将研究中央力量和第一个积分中的运动方程。 然后在第二秒。 5.4,您研究中央力下的轨道分类。 您将研究各种类型的轨道。 根据粒子的能量,轨道可以分类为无界和边界。 sec。 5.5,您将研究病毒定理及其应用。 病毒定理是一个重要定理,它提供了一个通用方程sec。5.3,您将研究中央力量和第一个积分中的运动方程。然后在第二秒。5.4,您研究中央力下的轨道分类。您将研究各种类型的轨道。轨道可以分类为无界和边界。sec。 5.5,您将研究病毒定理及其应用。 病毒定理是一个重要定理,它提供了一个通用方程sec。5.5,您将研究病毒定理及其应用。病毒定理是一个重要定理,它提供了一个通用方程
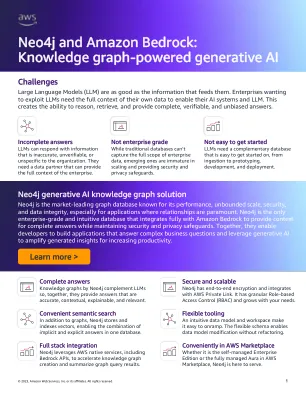
neo4j和亚马逊基岩:知识图形的生成ai
neo4j是以其性能,无界规模,安全性和数据完整性而闻名的市场领先图数据库,尤其是对于关系至关重要的应用程序。neo4j是唯一与Amazon Bedrock完全集成的企业级和直觉数据库,可在维护安全性和隐私保护措施的同时提供上下文。一起,他们使开发人员能够构建解决复杂业务问题的应用程序,并利用生成的AI来扩大生成的见解以提高生产率。

自主多智能体系统的防御策略
摘要 — 虚假数据注入 (FDI) 攻击对自主多智能体系统 (MAS) 构成重大威胁。虽然弹性控制策略可以解决 FDI 攻击,但它们通常对攻击信号有严格的假设,并且忽略了安全约束,例如避免碰撞。在实际应用中,配备先进传感器或武器的领导者智能体跨越安全区域来引导异构跟随智能体,确保协调行动,同时解决避免碰撞问题,以防止财务损失和任务失败。本文通过介绍和研究指数无界 FDI (EU-FDI) 攻击下的安全意识和攻击弹性 (SAAR) 控制问题来解决这些差距。具体而言,首先设计一种新型的攻击弹性观察者层 (OL) 来防御对 OL 的 EU-FDI 攻击。然后,通过使用二次规划 (QP) 解决优化问题,将避免碰撞的安全约束进一步集成到 SAAR 控制器设计中,以防止跟随者之间的碰撞。最后设计了一种抗攻击补偿信号,以减轻 EU-FDI 攻击控制输入层 (CIL) 造成的不利影响。基于 Lyapunov 的严格稳定性分析证明了 SAAR 控制器在确保安全性和弹性方面的有效性。本研究还开创了自主 MAS 的 SAAR 遏制控制问题的三维模拟,证明了其在现实多智能体场景中的适用性。索引术语 — 遏制、弹性、无界攻击、安全约束。
空间分组网络架构交易空间和潜在解决方案
用例属性 任务流量 消息延迟 用户带宽 通信模式 用户位置 可用性 战斗云 C2 非常低(<100 毫秒) 1-500 Kbps 单播 地面 持久 空间回程 TT&C 低(<5 秒) 1-500 Mbps 多播 LEO 按需 空中回程 交互式 高(10-50 秒) 1-3 Gbps Geocast MEO 预定地面回程 电话会议 无界 5-10 Gbps 发布/订阅 GEO 地面交换 流媒体 40+ Gbps 超越 GEO ISP 批量用户约束 用户链路客户端协议 TRANSEC 稳健性 连接性 网络规模 轨道 RF 定向 PPP/PPPoE LPI/LPD 战略连接 数十或更少 LEO RF 全向 SONET AJ 战术断开连接 数百 MEO 光定向 以太网 空间天气 数千 苔原 光漫射 IP 无界 GEO 量子链路 16 超越 GEO 其他 (MILCOM) 平台属性 有效载荷SWaP 功率 资产控制 内部链接 定制 低(150 千克) 低(150 瓦) 政府射频定向 COTS 中(500 千克) 中(1 千瓦) 商业射频全向 高 高(10 千瓦) 社区 光定向 量子 衍生网络属性 拓扑 功能 命名 路由 自治 内部协议 管理平面 调配时间 骨干 广播 固定 无 电路 NETCONF/YANG 分钟 尾部/边缘/存根 多播 预定 部分 SONET SNMP/MIB 小时 对等 固定(表格) 动态 完整 以太网 SDN 天 临时 IP 周