XiaoMi-AI文件搜索系统
World File Search System暗帧

对波浪状深色光子暗物质的最深敏感性和超导射频腔
波浪般的,玻色粒暗物质候选者(如轴和暗光子)可以使用称为卤素菌的微波腔检测到。传统上,卤素由在TM 010模式下运行的可调铜腔组成,但欧姆损失限制了其性能。相比之下,超导射频(SRF)腔可以达到约10 10的质量因子,也许比铜腔好5个数量级,从而导致更敏感的暗物质检测器。在本文中,我们首先得出了吊带镜实验的扫描速率与负载的质量因子Q L成正比,即使腔带宽比暗物质晕线线窄得多。然后,我们使用非偏高的超高质量SRF腔进行了概念验证搜索。我们排除了深色光子暗物质,具有χ> 1的动力学混合强度。5×10 - 16对于M A0¼5的深色光子质量。35μEV,几乎通过一个数量级获得了最深的范围排除在波浪状的深色光子上。
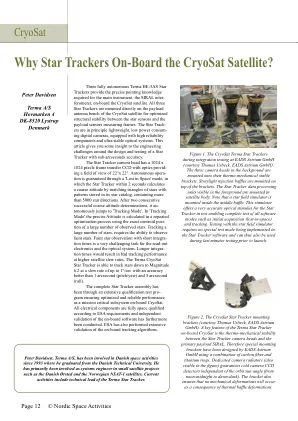
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。
![arXiv:2209.08843v1 [hep-ph] 2022 年 9 月 19 日](/simg/c\cf274d35c29bf977178d34afafb6fd4d045d2220.webp)
arXiv:2209.08843v1 [hep-ph] 2022 年 9 月 19 日
暗光子的概念[1–3]已被许多理论物理学家和实验物理学家研究过。通常,暗光子与可见物质的相互作用假设为标准模型(SM) U (1) Y规范群和暗U (1) X规范群之间的阿贝尔动力学混合。由于低能对撞机[4–6]、介子衰变[7–9]、束流倾倒实验[10–12]和高能对撞机[13–18]等不同实验的限制,这种U (1)动力学混合不可能很大。然而,解释可重正化的U (1)动力学混合之小并不明显。在本文中,我们将考虑非阿贝尔动力学混合,以实现另一种可能性,即暗光子来自暗SU (2) X规范群,因此它与物质的耦合不在可重正化的水平上出现[19–21]。在暗 SU (2) X 规范群与 SM SU (2) L × U (1) Y 规范群的非阿贝尔动力学混合下,一个暗规范玻色子变成暗光子,而其他玻色子保持稳定形成暗物质粒子。这一情景预测了暗光子和暗物质的近简并质量谱。

使用 CNN 特征跟踪连续视频帧中的关键点以用于太空应用
摘要:太空任务中的严格时间限制带来了许多自主任务的快速视频处理问题。视频处理涉及分离不同的图像帧、获取图像描述符、应用不同的机器学习算法进行物体检测、避障以及航天器自动操纵中涉及的许多其他任务。这些任务需要在时间限制内对图像进行最翔实的描述。在流量估计应用中,需要从连续图像帧中跟踪这些信息点。SIFT 和 SURF 等经典算法是特征描述开发的里程碑。但计算复杂性和高时间要求迫使关键任务避免在实时处理中采用这些技术。因此,本文选择时间保守且复杂度较低的预训练卷积神经网络 (CNN) 模型作为特征描述符。使用预训练的 VGG 模型参数设计和实现 7 层 CNN 模型,然后使用这些 CNN 特征匹配月球下降视频连续图像帧中的兴趣点。系统的性能是基于视觉和经验关键点匹配来评估的。然后使用 CNN 特征将视频中两个连续图像之间的匹配分数与 SIFT 和 SURF 等最先进的算法进行比较。结果表明,对于太空任务的关键点跟踪应用,在时间关键的视频处理任务中,CNN 特征更可靠、更稳健。关键词:人工智能;卷积神经网络;特征描述符;机器学习;太空任务 1 引言
Banner OMNI-BEAM 光电传感器 - ValinOnline.com
“暗”信号在显示屏上从未低于 #4;降低增益设置。有两个可能的原因:1) “暗”信号缓慢增加并在预定的延迟时间内保持在 #4 级别,通常是由于反射传感模式(如漫反射或会聚)中不必要的背景反射逐渐增加所致。一旦消除了不必要的光信号的原因,或者如果降低增益控制设置以使“暗”条件低于 #4 级别,警报就会重置。2) 在传感事件期间,“暗”信号不会低于 #4 级别。当“暗”传感级别低于 #4 级别时,警报会自动重置(通过降低增益控制设置和/或消除“暗”条件下不必要的光返回的原因来实现)。

光电自动检测及高精度系统...
摘要。本文介绍了可见光和红外频段数字视频处理技术在空中物体实时自动检测和精确跟踪方面的发展成果。开发了基于空中物体实时自动检测和精确跟踪的算法和软件。对算法进行了测试并评估了其性能。通过测量按顺序处理每帧所花费的时间来评估算法的性能。测试结果发现,在执行现场可编程门阵列 (FPGA) 算法时,处理帧所花费的时间与物体配置、帧填充和背景特征无关。当算法在 FPGA 上以 1920x1080 的帧大小执行时,其速度比在个人计算机 (PC) 上的执行速度快 20 倍以上。

基于事件的图像去模糊粗到精融合网络
事件驱动的图像去模糊是一种创新方法,涉及输入从事件相机获取的事件以及模糊帧以促进去模糊过程。与传统相机不同,事件驱动成像中的事件相机表现出低延迟特性并且不受运动模糊的影响,从而显著提高了图像去模糊的效果。在本文中,我们提出了一种开创性的基于事件的由粗到细的图像去模糊网络CFFNet。与现有的去模糊方法相比,我们的方法结合了事件数据,从单个帧生成多个粗帧,然后进一步将它们细化为清晰的图像。我们引入了一个事件图像融合块(EIFB)来粗融合事件和图像,在不同的时间点生成粗帧。此外,我们提出了一个双向帧融合块(BFFB)来对粗帧进行精细融合。CFFNet 通过从粗到细的全面融合过程有效地利用了事件数据的时空信息。在 GoPro 和 REBlur 数据集上的实验结果表明,我们的方法在图像去模糊任务中达到了最先进的性能。
二维单分子层中单个自旋交叉分子的电压诱导双稳态
图 2:Cu(111) 上的电压脉冲。a) 3 . 5 × 3 . 5 nm 2 STM 初始状态的形貌图像,其中暗(HS)邻居(V = 0 . 3 V,I = 5 pA)和 b) 4 . 8 × 4 . 8 nm 2 STM 初始状态的形貌图像,其中亮(LS)邻居(V = 0 . 3 V,I = 5 pA)。黑点表示两种环境中电压脉冲的位置。c)、d) 分别在暗(HS)和亮(LS)邻居的 0.5 V 电压脉冲期间记录的典型 I(t) 轨迹。e)、f) 分别在暗(HS)和亮(LS)邻居的 I(t) 轨迹的每个平台的电流乘以持续时间(I×∆t)的分布。红色圆圈(蓝色方块)对应于从亮(LS)到暗(HS)(暗(HS)到亮(LS))分子的实验事件分布。虚线对应于每个分布的单指数拟合。g)、h) 两种环境下 LS 和 HS 状态在 0.5 V 时的相对势能示意图。

与扩散模型的灵活运动
运动内部的运动是字符动画中的基本任务,包括生成运动序列,这些运动序列合理地插值用户提供的密钥帧约束。长期以来,它一直被认为是一个劳动密集型和具有挑战性的过程。我们研究了扩散模型在产生以关键帧为指导的各种人类运动中的潜力。与以前的Inbeting方法不同,我们提出了一个简单的统一模型,能够生成精确而多样的动作,以符合灵活的用户指定的空间约束以及文本调理。为此,我们提出了条件运动扩散在中间(condmdi),该扩散允许任意密集的或sparse的密钥帧放置和部分密钥帧约束,同时产生与给定密钥帧相干的高质量运动。我们评估了Condmdi在文本条件的HumanM3D数据集上的性能,并演示了扩散模型对密钥帧In-bet中间的扩散模型的多功能性和功效。我们进一步探索使用

隐藏在显眼的地方:从月球表面天文台观察低月球轨道上的物体和 L2 暗锥
• 对 EML-1 隐藏区域中的物体进行天体动力学、覆盖范围和辐射测量 • 逐步部署多个站组成的网络,首先在南极站具备初始作战能力 (IOC),并具有持续太阳照射和地球 LOS 进行通信 • 使用月球勘测轨道器 (LRO) VIS、IR 和 LIDAR 地图进行选址 • 源自 Ball CT-2020 星跟踪器的宽视场 (WFOV) 摄像机 • 指向天顶的相关鱼眼摄像机以检测附近和快速移动的物体 • Ball 防尘和干式润滑技术可保护光学器件、太阳能电池板和运动部件 • 我们在 L-CiRIS 热成像摄像机中学到的月球独特的热工程经验将于 2023 年交付到月球南极 • 由 NASA 预先批准的供应商作为商业产品进行月球表面交付 • 将带电粒子、射频和其他有效载荷与摄像机组合在一起的仪器套件,共同完成任务 • 额外科学:悬浮月球尘埃、探路者用于天文观测的大型电光或红外(EOIR)月球观测站