XiaoMi-AI文件搜索系统
World File Search System朝下
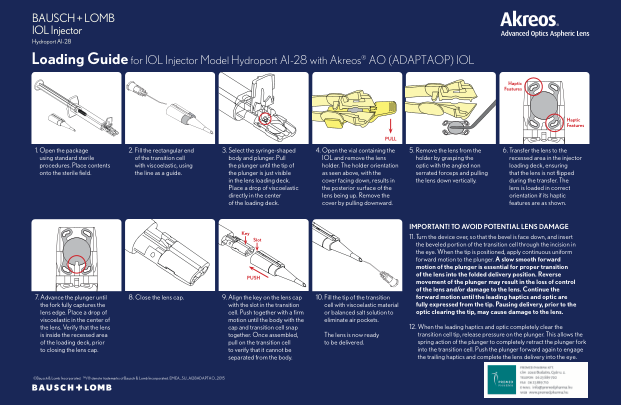
带...的 IOL 注射器型号 Hydroport AI-28 装载指南
将装置翻转,使斜面朝下,然后将过渡单元的斜面部分插入眼睛的切口。当尖端定位后,对柱塞施加连续均匀的向前运动。缓慢平稳地向前移动柱塞对于将镜片正确过渡到折叠输送位置至关重要。反向移动柱塞可能会导致镜片失控和/或损坏镜片。继续向前移动,直到领先的触觉和光学元件完全从尖端挤出。在光学元件离开尖端之前暂停输送可能会损坏镜片。

大型飞机简易通行规则 (CS-25)(初始版本)
第 25.471 条 总则 ................................................................................................ 170 第 25.473 条 着陆载荷条件和假设 .............................................................................. 170 第 25.477 条 起落架布置 .............................................................................................. 171 第 25.479 条 平着陆条件 .............................................................................................. 171 第 25.481 条 尾朝下着陆条件 ...................................................................................... 172 第 25.483 条 单起落架着陆条件 ...................................................................................... 172 第 25.485 条 侧向载荷条件 ............................................................................................. 172 第 25.487 条 反弹着陆条件 ............................................................................................. 173 第 25.489 条 地面处理条件 ............................................................................................. 173 第 25.491 条 滑行、起飞和着陆滑跑 ................................................................................ 173
居家人体工学办公室
1) 坐在椅子上,十指交叉放在身体前方,手掌远离身体。轻轻伸直肘部并向前伸展。保持伸展 10-20 秒,重复 2 次。 2) 站立十指交叉,双臂举过头顶,手掌向上。保持伸展 10-15 秒。 3) 站立双臂举过头顶,抓住另一侧的肘部,左右倾斜。每侧保持伸展 8-10 秒。 4) 站立十指交叉,双臂举过头顶,手掌向上。保持伸展 15-20 秒。 5) 站立双臂放在身体两侧,向上和向后转动肩膀,保持 3-5 秒,重复 3 次。 6) 站立双臂在背后,用另一只手抓住手腕并拉动,同时将头歪向一侧。反向重复,每只手臂 10 – 12 秒。 7) 站立掌心朝上,十指朝上,双手向下推,保持 10 秒。 8) 站立掌心朝下,十指朝下,双手向上拉,保持 10 秒。 9) 坐在椅子上,将一只手臂伸过头顶,手掌向上,另一只手臂向下,手掌朝后。每侧保持伸展 8-10 秒。10) 坐在椅子上,交叉一条腿放在另一条腿上,将另一只手臂放在膝盖上,向开放侧扭转,每侧 8-10 秒。11) 坐下,将双手放在下背部支撑,向后倾斜,10-15 秒。12) 双臂站立放在身体两侧,向外甩动双手,8-10 秒。

使用说明书 - Rodem
您的新 HA 变送器配有导管外壳。如果水平安装,导管连接应朝下。此外,为防止过多湿气进入,强烈建议不要将柔性导管直接连接到传感器。如果要将导管连接到传感器,最好不要从传感器上取下每个传感器提供的防水连接器。相反,将柔性导管尽可能靠近传感器,并在导管末端使用密封连接器。在传感器和柔性导管之间放置一小段电缆。这样可将传感器外壳与导管系统及其可能包含的任何湿气隔离开来。如果导管直接连接到传感器,传感器最终可能会因过多的水或水蒸气进入外壳而失效。

使用说明书 - Anderson-Negele
您的新 RSV 变送器配有导管外壳。如果水平安装,导管连接应朝下。此外,为防止过多湿气进入,强烈建议不要将柔性导管直接连接到传感器。如果要将导管连接到传感器,最好不要从传感器上取下每个传感器提供的防水连接器。相反,将柔性导管尽可能靠近传感器,并在导管末端使用密封连接器。在传感器和柔性导管之间放置一小段电缆。这样可将传感器外壳与导管系统及其可能包含的任何湿气隔离开来。如果导管直接连接到传感器,则传感器最终可能会因过多的水或水蒸气进入外壳而失效。

R757-2-附件-II.pdf
如何使用 TEVA 仿制 EPIPEN®(肾上腺素注射液,USP)自动注射器,TEVA 制药工业 1. 迅速沿“扭转箭头”方向扭转自动注射器的黄色或绿色盖子将其取下。 2. 握紧自动注射器,橙色尖端(针头)朝下。 3. 用另一只手拉开蓝色安全释放装置。 4. 将橙色尖端与大腿外侧(大腿)中部成直角(垂直)。 5. 摆动自动注射器并将其牢牢推入大腿外侧中部,直至听到“咔”的一声。 6. 稳稳地保持 3 秒钟(慢慢数 1、2、3)。 7. 取下并按摩注射部位 10 秒钟。 8. 拨打911并立即获得紧急医疗救助。
AFI 91-111——核弹
12.2.1.卡入式 B53-1 核弹: • 手动和电动炸弹释放系统控制器未处于释放或开启位置。• 特殊武器手动锁定手柄处于锁定位置,安全接线并密封。• 释放电路断开 (RCD) 断开,盖子关闭,安全接线并密封。• 特殊武器手动释放手柄处于未启动位置,安全接线并密封。• 紧急炸弹释放开关(如果安装)处于关闭位置,安全接线并密封。• 离屏安全 (OMS)/安全臂 (SA) 联锁杆 (DCU-238/A) 处于 OMS 位置,安全接线并密封。• 准备开关 (DCU-47/A) 处于安全位置,盖子朝下,安全线已接好并密封。

PH 201 家庭作业章节:工作与能源
25. 在钢架雪车运动中,参赛者跳上雪橇(称为钢架雪车),然后沿着结冰的赛道滑行,腹部朝下,头部朝前。在 2010 年冬奥会上,赛道有 16 个弯道,从上到下的高度差为 126 米。(a)在没有非保守力(如摩擦力和空气阻力)的情况下,选手在赛道底部的速度是多少?假设滑行开始时的速度相对较小,可以忽略不计。(b)实际上,金牌得主(加拿大选手 Jon Montgomery)在一次预赛中就以 40.5 米/秒(约 91 英里/小时)的速度到达赛道底部。在这次预赛中,非保守力对他和他的雪橇(假设总质量为 118 公斤)做了多少功?
AFI 91-111 - 核武器
12.2.1. 卡入式配合的 B53-1 核弹: • 手动和电动炸弹释放系统控制装置未处于释放或开启位置。 • 特殊武器手动锁定手柄处于锁定位置,安全接线并密封。 • 释放电路断开 (RCD) 在盖子关闭的情况下断开,安全接线并密封。 • 特殊武器手动释放手柄处于未启动位置,安全接线并密封。 • 紧急炸弹释放开关(如果安装)处于关闭位置,安全接线并密封。 • 显示器外安全 (OMS)/安全臂 (SA) 联锁杆 (DCU-238/A) 处于 OMS 位置,安全接线并密封。 • 准备开关 (DCU-47/A) 处于 SAFE 位置,盖子朝下,安全接线并密封。
用于 76-GHz 汽车雷达的 HEMT 毫米波单片 IC 技术
本文介绍了用于开发实用汽车雷达系统的单片 IC 技术,涵盖 HEMT 器件结构、IC 制造工艺、倒装芯片组装和电路设计。具有 0.15 µm 栅极的 InGaP/InGaAs HEMT 用于 W 波段的毫米波单片 IC,在 76 GHz 时提供 9 dB 的最大稳定增益。高度控制倒装芯片键合与柱互连被证明是一种低成本的组装方法。提出了一种用于模拟面朝下的共面波导的去嵌入技术。使用该技术设计了一个芯片组,包括 76 GHz 放大器、76 GHz 混频器、76 GHz SPDT 开关、38/76 GHz 倍频器、38 GHz 压控振荡器和 38 GHz 缓冲放大器。所制造的芯片组在汽车雷达系统中表现出了高性能。