XiaoMi-AI文件搜索系统
World File Search System机械臂

尼康“多圈绝对式编码器”采用麦克赛尔的PSB401010H全固态电池,耐环境性*1得到认可,
*1 环境耐久性:电池的工作温度范围请参阅 Maxell 全固态电池网页详情。https://biz.maxell.com/en/rechargeable_batteries/allsolidstate.html *2 绝对编码器:绝对编码器是一种传感器设备,常用于汽车生产线、机床等工业机器人。其目的是检测机械臂旋转位移和类似测量的绝对值。 *3 可通过回流焊进行表面贴装:在最高温度 245°C 下回流不会降低容量和负载特性等基本特性。

搭载空中机械手的六旋翼飞行器的导航控制与稳定性研究
摘要 本文使用牛顿-欧拉法建立了配备机械臂的六旋翼飞行器的动力学模型,并研究了其稳定性。为了模拟干扰,使用了简化的摆锤法。这种六旋翼飞行器配置以前从未在科学论文中涉及过。所得模型是一个非线性、耦合和欠驱动的动力学模型,其中包括由于六旋翼飞行器配备机械臂而产生的空气动力学效应和干扰。本文的目的是全面研究使用简化摆锤法确定六旋翼飞行器的惯性矩,同时考虑到质量分布和重心变化的影响,这是六旋翼飞行器在空中运动期间机械手连续运动的结果。实验测试是使用 Solid Works 应用程序进行的,并使用 LabVIEW 进行评估,以便全面了解插入到动力学模型中的干扰。整个飞行器模型由四个经典的 PID 控制器驱动,用于控制飞行器的姿态和空间中所需轨迹的高度。这些控制器用于很好地理解如何评估和验证模型,使其成为抗干扰模型,此外,它们还易于设计和快速响应,但它们需要开发才能获得最佳结果。将来,将定义精确的轨迹,

机械工业
控制、自动化和机器人 (CAR) 实验室位于 Seamans 工程艺术与科学中心,由机械工程系管理。它为学生提供先进控制、机器人和自主系统方面的体验。实验室配备了一个工业 6 轴机械臂、两个带协作机械臂的 Kuka 移动机器人 (KMR iiwa 和 KMP)、一台台式计算机、两个 Roboception 摄像头、一个 co-act 和一个吸盘夹持器以及四个 Quanser 旋转伺服基座。该设施拥有最新的软件技术,例如 LabVIEW 和 KUKA.Sim。Quanser 单元用于 ME:3600 机械工程系统控制的实验室作业,而机器人系统用于 ME:4140 现代机器人和自动化。2019 年秋季,基于两个 Quanser 基座开发了两个控制实验室。控制实验室是在 CAR 中开发和测试的,并设置为容纳大班。后来,又购买了两个额外的基座和三个附件模块来扩展控制实验室。此外,机器人系统还用于 ME:4111 科学计算和机器学习以及 ME:4150 工程人工智能,以协助教授相关课程材料。获准在实验室从事荣誉和研究项目的学生也可以使用 CAR 实验室。

通过身体图式和身体形象来理解有趣的身体延伸设计
交互设计师对物理延伸人体的机会越来越感兴趣。例如,设计师已经开发出系统,当用户现有的机械臂忙碌时,可以为用户提供一对额外的机械臂(Sasaki 等人,2017 年),或者当用户现有的手已经拿了其他东西时,可以为用户提供一只额外的手(Leigh 和 Maes,2016 年)。这些系统反映了更广泛的以身体为中心(Mueller 等人,2018 年)的人机交互趋势,其特点是计算机器和人体之间更紧密的集成(以及随之而来的融合)(Mueller 等人,2020 年)。到目前为止,这种集成的预期好处大多是工具性的,这表明由此产生的融合可以帮助人们更高效地完成任务,就像上面提到的手臂和手的例子一样。然而,一些系统正在出现,它们超越了任务支持,专注于体验方面。一个例子是戴在头上的交互式耳朵系统(Necomimi,2021 年)。佩戴者的耳朵会根据他们的情绪状态摆动,这是通过跟踪他们的大脑活动来捕捉的。目标用户群是 Cosplay 社区(Cosplay 是“costume play”的混合词,指的是“亚文化,其成员模仿极客媒体中的角色”,使用引人注目的服装和时尚配饰——这些服装和配饰越来越多地被商业化设计,例如 Cosgear (2021)——
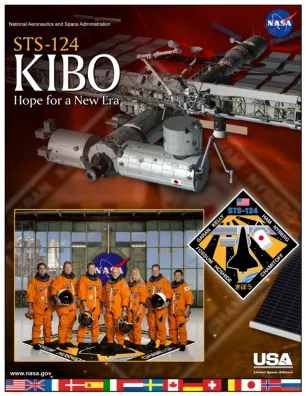
全页照片打印 - NASA
因此,在通常用于 OBSS 检查的飞行第二天,航天飞机机械臂上的末端执行器相机将用于捕捉发现号耐热瓦片的初始图像。吊杆将在第四天回收,即 Fossum 和 Garan 计划进行的三次太空行走中的第一次,然后交还给航天飞机的机械臂。如果需要,它将用于对隔热罩进行详细检查,然后在航天飞机脱离空间站后对发现号进行最终检查。OBSS 随后将被带回地球,在后续的航天飞机任务中重新飞行。
佛蒙特大学电气工程系(ee)
EE 5550. 自主性。3 个学分。学生将学习如何使工程系统自主/智能化。涵盖逻辑和算法、动态系统的实时估计和控制、优化和最优规划、机器人和自动驾驶汽车的路径规划、人工智能和机器学习的基础知识以及自动化伦理。应用包括四旋翼无人机的悬停飞行、机器人(包括机械臂和自动驾驶汽车)的感知和导航以及电网的自主控制。先决条件:研究生或讲师许可;假定具备控制系统(例如 EE 3515)的内容知识。

激光微加工是一种灵活、高精度的制造工艺
虽然激光可能是微加工系统的核心,但成功的加工过程依赖于机器各个方面的协调配合。需要精心挑选的光学元件和光机械元件来将光束传送到工件上。高精度、顶级的运动控制系统和平台必须与机器视觉协同工作,以精确、可重复地移动工件。此外,集成的机械臂、管式装载机和传送带必须自主工作(或与操作员协同工作),以安全地处理零件,支持大批量生产。

假肢的感人瞬间:能“感觉”的新型仿生肢体
过去也曾出现过类似的 BCI。然而,这些 BCI 有局限性。用户可以按下按钮——这是一个不需要连续移动的简单动作。事实证明,使用这些 BCI 很难实现更复杂的动作。在何和他的团队的演示中,受试者通过精神控制机械臂跟踪光标。假手指能够像真手指一样连续跟踪光标。他说,该系统可以与用脑电图记录和无线电极编程的智能手机应用程序一起使用。这将消除对脑部手术的需要。
利用机器人技术提高工作场所安全
机器操作、零件重新定位和拾取和放置:由工人进行的机器操作和零件重新定位涉及从工业机械中物理调整或移除生产零件或工具和材料——依靠屏幕和基本传感器来固定重型压制设备或快速旋转工具,以防止意外伤害。人类操作员有时会为了提高生产率或便利性而绕过此类安全机制,从而增加严重伤害和死亡的风险。通过用机械臂和 AMR 取代机器操作员,可以消除这些重复性和高风险的任务。

RoboGrav – 面向力敏感空间机械手
摘要 —本文介绍了 RoboGrav,这是一项专注于在第 42 次 DLR 抛物线飞行活动期间在零重力条件下测试全扭矩传感机械臂的任务。RoboGrav 与德国航空航天中心 (DLR)、KINETIK Space、iBOSS、慕尼黑工业大学 (TUM) 和 Novespace 合作进行,旨在推进扭矩控制机器人操纵器的开发和测试,用于在轨服务 (OOS) 和空间组装任务。本文强调了扭矩感应的重要作用,它增强了零重力条件下的操纵任务。进行了实验测试,以确保控制器在零重力下的自由空间运动期间的稳定性,使用针状末端执行器进行环境相互作用。采用外力感应来评估机器人在不同控制器上的准确性和性能。这也使得能够比较机器人在零重力和全重力环境中的行为,为将地球开发的算法转移到太空应用提供了宝贵的见解。使用 iBOSS“iSSi”接口进行的模拟卫星对接任务展示了机器人通过阻抗控制管理位置误差的能力,从而提高了操作稳定性。为该项目开发的技术,例如扭矩传感器的集成、所提出的基于 FPGA 的联合控制算法和通信接口、高级控制器和决策算法,可以转移到未来的太空任务中。RoboGrav 的扭矩传感器机械臂为未来的太空服务和太空组装任务提供了宝贵的经验和方法。