XiaoMi-AI文件搜索系统
World File Search System机械设计

机械和航空航天工程
符合行业的认证 • 工程技术基础 • 预工程/工程技术 - 就业准备 • 精益六西格玛绿带认证 • 航空航天制造认证 • Autodesk Associate(认证用户)AutoCAD • Autodesk Associate(认证用户)Fusion 360 • Autodesk Associate(认证用户)Inventor 机械设计 • Autodesk Associate(认证用户)Revit Architecture • Autodesk Associate(认证用户)Revit 电气 • Autodesk Associate(认证用户)Revit 结构设计 • Autodesk Certified Professional Fusion 360 • Autodesk Certified Professional in AutoCAD 设计和制图 • Autodesk Certified Professional in Civil 3D 基础设施设计 • Autodesk Certified Professional in Inventor 机械设计

对机器人抓手的机械设计进行了调查,该机器人使用低成本传感器进行了智能控制,并随着行业4.0的出现,有一个
对机器人抓手的机械设计进行了调查,该机器人使用低成本传感器随着行业4.0的出现而进行了智能控制,越来越需要智能和自动化的机器人系统,能够在未知的环境中执行复杂的任务。这项工作着重于用于机器人抓手的机械设计的开发,以及使用FANUC机器人平台选择目标的智能操作。所提出的方法结合了抓手,高级运动控制技术的计算力学以及握把控制策略,以使机器人臂能够准确有效地识别并选择目标对象。为了验证我们的方法,在各种情况下进行了几项实验验证。据认为,拟议的工作是可行的,有效且适用于广泛的工业应用的。关键字:机器人抓手,机械设计,智能控制,拾音器和位置,运动控制。1。引言近年来,工业机器人已成为现代制造工艺的整体部分,从而实现了有效的生产和精确的自动化[1,2]。尤其是,以其机器人和多功能性而闻名的工业机器人部门在各个工业领域都具有显着的突出性。其功能的一个关键方面是成功地操纵对象,尤其是在选择[3,4]和放置目标[5-7]等任务中。机器人抓手的机械设计是直接影响目标拾取成功的关键因素[12-14]。众多研究集中在手工握手的技术规范上[8,9]以及智能操纵技术的整合[10,11],用于使用工业机器人系统的精确选择目标。的确,机器人抓手在安全抓住目标对象方面发挥了关键作用,而英特尔 - 连接的操纵技术增强了机器人臂的每 /形式的高度,以适应各种特征 - 包括形状,大小和尺寸和Orien- tations对象的特征。此抓手必须具有处理各种物体类型的多功能性,涵盖了从精致的物品到重组件。它应该提供安全,稳定的抓握动作,同时最大程度地减少对目标对象或机器人组本身损坏的风险。考虑到这些要求,改进的抓地力设计可以显着提高采摘过程的整体性能和效率。
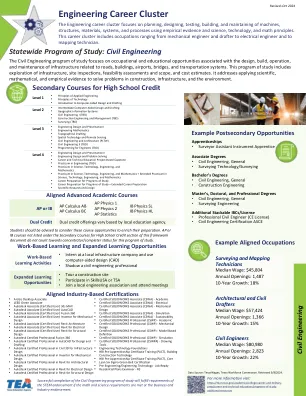
全州学习计划:土木工程
符合行业的认证 • ArcGis Desktop Associate • LEED Green Associate • Autodesk Associate(认证用户)3ds MAX • Autodesk Associate(认证用户)AutoCAD • Autodesk Associate(认证用户)Fusion 360 • Autodesk Associate(认证用户)Inventor 机械设计 • Autodesk Associate(认证用户)Revit Architecture • Autodesk Associate(认证用户)Revit 电气 • Autodesk Associate(认证用户)Revit 结构设计 • Autodesk Certified Professional Fusion 360 • Autodesk Certified Professional in AutoCAD 设计和制图 • Autodesk Certified Professional in Civil 3D 基础设施设计 • Autodesk Certified Professional in Inventor 机械设计 • Autodesk Certified Professional in Revit 建筑设计 • Autodesk Certified Professional in Revit 电气设计 • Autodesk Certified Professional in Revit 结构设计
《合成生物学、网络防御和航空机械设计中的人工智能》(作者:Bryan Glaz、Cliff Wang、Margaret Hurley 和 Alexander Kott)
估计此次信息收集的公共报告负担平均为每份回应 1 小时,包括审查说明、搜索现有数据源、收集和维护所需数据以及完成和审查收集信息的时间。请将关于此负担估计或本次信息收集任何其他方面的评论(包括减轻负担的建议)发送至国防部华盛顿总部服务处信息行动和报告局 (0704-0188),地址:1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302。受访者应注意,尽管法律有其他规定,但如果信息未显示当前有效的 OMB 控制编号,则任何人均不会因未遵守信息收集而受到任何处罚。请不要将您的表格寄回上述地址。
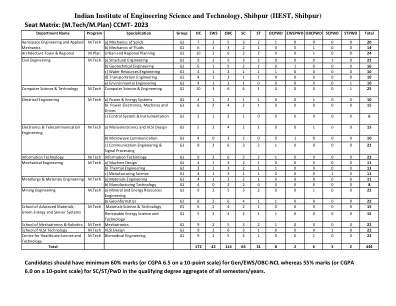
印度工程科学技术学院,Shibpur(IIEST,Shibpur)座位矩阵:(M.Tech/M.Plan)CCMT-2023
信息技术 M.Tech 信息技术 G1 9 2 6 3 2 1 0 0 0 0 23 a) 机械设计 G1 4 1 3 2 1 0 0 0 0 0 11 b) 热能工程 G1 3 1 3 2 1 1 0 0 0 0 11 c) 制造科学 G1 4 1 3 1 1 0 0 0 1 0 11 a) 材料工程 G1 4 1 3 2 1 0 0 0 0 0 11 b) 制造技术 G1 4 0 2 2 0 0 0 0 0 0 8 a) 矿产与能源资源工程

使用先进的显微镜技术对材料进行机械表征
本综述探讨了先进显微镜技术与机械工程之间的协同关系,概述了它们对材料科学和机械系统设计的深远影响。我们深入研究了电子显微镜、X 射线衍射和光谱方法在理解机械工程中不可或缺的材料的微观结构动力学、机械性能和失效机制方面的多方面应用。通过对近期研究的综合综合,我们强调了这些技术在优化材料性能、增强结构完整性和推动机械设计创新方面发挥的关键作用。通过阐明微观尺度上材料行为的复杂细节,先进的显微镜有助于在材料选择和设计过程中做出明智的决策。此外,我们还讨论了新兴趋势和前景,强调了先进显微镜与机械工程之间的持续协同作用。这种合作仍然处于材料科学和技术的前沿,有望取得持续进步,塑造机械设计和材料创新的未来格局。

机械工程技术(MCET)
MCET 101 机械设计简介(3 个学分)先修课程:AMET 140 或 MCET 121。共同要求:[AMET 230 或 MCET 100] 和 MATH 154。工程制图主题:惯例、剖面、尺寸和公差。详细图纸、子装配图和装配图。各种机械部件和机械设计工具简介。(原 2920:101)
航空燃气涡轮发动机设计关键技术
关键技术:• 3D 空气动力学,即高负荷压缩机和涡轮机→部件效率、重量、SFC• 最先进的稀薄燃烧→SFC、排放• 先进材料(高温和金属复合材料)→更高的 T4、重量、SFC• 先进的冷却技术→更高的 T4、重量、SFC• 先进的机械设计和密封→更紧密的间隙和缝隙、效率、SFC

Andrew Carney GoeringAndrew Carney Goering
2023–2024机械实验室技术 - 伍兹孔海洋学,伍兹孔,MA,对更新的模块化船体和内部组件进行了机械设计和分析,用于100米级的Remus自主水下车辆(AUV),作为Phoenix Initiative的一部分。得出了一个数学模型,并完成了在ONR资助的3000米级remus auv上填充油脂推进器的压力补偿器系统的机械设计和测试,这构成了气泡的行为。对关键任务内部组件设计和执行了结构分析。支持100、600和3000米的AUV的海洋运营,测试以及维护,以确保海军和科学应用的安全,及时和成功的部署。设计,构建和测试了一个原型REMUS 600 AUV对接系统,该系统使用电感冰球为ONR资助的AMOS程序提供了长期iCe底部部署的充电和数据传输。