XiaoMi-AI文件搜索系统
World File Search System板载

sq-cars:可扩展的量子控制和读数系统
摘要 - Qubits是量子处理器的基本构建块,量子处理器需要Giga Hertz频率范围内的电磁脉冲和纳秒频率的延迟,以进行控制和读数。在本文中,我们解决了与用于控制和测量超导码头的室温电子相关的三个主要挑战:可伸缩性,直接Mi-crowave合成和一个固定的用户界面。为了应对这些挑战,我们开发了基于ZCU111评估套件的系统。SQ-CARS设计为可扩展,可配置和相位同步,提供多数控制和读数功能。该系统提供了交互式Python框架,使其对用户友好。通过确定多个通道的确定性同步来实现对较大Qubits的可伸缩性。该系统支持从4到9 GHz的第二个Nyquist区域技术直接合成任意矢量微波脉冲。它还具有板载数据处理,例如可调的低通滤波器和可配置的旋转块,可实现锁定检测和量子实验的低延迟活动反馈。通过板载Python框架可以访问所有控制和读数功能。为了验证SQ-CARS的性能,我们进行了各种时间域测量值,以表征超导式的Transmon Qubit。我们的结果与类似实验中常用的传统设置进行了比较。通过确定控制和读取通道的确定性同步,以及用于编程的开源方法,SQ-CARS为具有超导码头的高级实验铺平了道路。


22可重构语义的可重构框架...
深度学习(DL)为实现航天器的自治,板载分析和智能应用程序提供了新的机会。然而,DL应用在计算密集型上,并且在辐射硬化(RAD-HARD)的处理器上通常不可行,传统上可以利用其商业商业现成的计算能力的一部分。商业FPGA和系统 - 芯片具有许多建筑优势,并提供了计算功能,以实现板载DL应用程序;但是,这些设备非常容易受到辐射诱导的单事件效率(SEE)的影响,可降低DL应用的可靠性。在本文中,我们提出了可重新配置的Convnet(Recon),这是可靠,高性能的语义分割的可重新配置加速框架。在侦察中,我们提出了选择性和自适应方法,以实现有效的方法,请参见缓解。在我们的选择性方法中,控制流部分受到三型冗余的有选择性保护,以最大程度地减少倾斜诱导的悬挂,并且在我们的自适应方法中,使用部分重新配置来调整数据流零件的缓解,以响应动态辐射环境。组合,这两种方法都使侦察能够最大程度地提高系统可行性,但要受到任务可用性约束。我们执行断层注射和中子照射,以观察侦察和使用可靠性建模的敏感性,以评估各种轨道案例研究中的侦察,以证明与静态方法相比,性能和能量效率的性能提高了1.5-3.0倍。

Jack Weigh™ 称重传感器套件
• 可与任何无线或有线系统配合使用(包括现有的) • 板载打印称重传感器、组毛重、重心、日期、时间和 ID • 易于阅读的字母数字 LCD 屏幕 • 可同时操作多达 32 个 Jack Weigh™ 传感器 • 用于计算、内存存储和完整 CG 打印输出的按钮菜单 • 即插即用功能 • USB/RS232 输出 • 键盘校准 • 符合 Mil-Spec 461 的 EMI-RFI 要求 • 完全防水 • 现有的有线 ACWeigh™ CPU 单元可以转换为 RFX™ 无线 • 使用多种电源运行
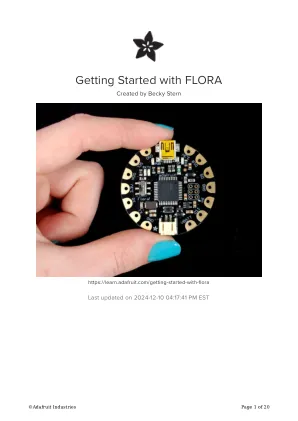
开始使用 FLORA
Flora 最容易混淆的部分是 VBATT 垫以及 Flora 中如何处理电源管理。我们设计了 flora 主要通过 JST 连接器供电。您可以使用电池组或锂电池为其供电。该输入具有极性保护,也可通过开/关开关控制。开关后的电池输出为 VBATT 。您不应使用 VBATT 作为输入,因为如果您还将 USB 连接器插入计算机,可能会损坏电池!VBATT 的理想用途是当您想要为 NeoPixels 或伺服器等设备供电时,这些设备需要超过板载调节器提供的 150mA 的电流。

Synology DiskStation DS920+ 产品规格 - 下载中心
3. 性能数据可能因环境、使用情况和配置而异。 4. 可能需要根据使用情况购买许可证。要了解更多信息,请访问 https://www.synology.com/products/Device_License_Pack 5. DS920+ 配备 4 GB DDR4 板载内存,通过添加一个可选的 DDR4 非 ECC 4 GB SO-DIMM 可支持高达 8 GB。 6. exFAT Access 可在套件中心单独购买。 7. 系统快照包括 iSCSI Manager、Snapshot Replication 和 Virtual Machine Manager 拍摄的快照。这些套件的可用性取决于

Logitech G309 Lightspeed无线游戏鼠标? ...
技术规格Lightforce开关混合光学机电开关Lightspeed无线技术最多5个在板载内存配置文件PTFE脚V脚电池寿命 - 电池寿命可能会根据用户和计算条件而变化,并计算恒定运动300+小时,使用Lightspeed无线,600+ 600+具有蓝牙跟踪传感器:英雄25K分辨率:100 –25,25,600 dpi max Maxs。加速度:> 40 g在Logitech G240游戏鼠标垫上最大。速度:>在Logitech G240上进行的400 IP

UCF的Lunabotics 2024-佛罗里达太空研究所
红色紧急停止按钮或“杀死开关”如下:使用声音工程实践和原理在将“杀死开关”放在机器人上,未能这样做可能会导致安全取消资格。“杀戮开关”的最小直径为40毫米;它应位于施工机器人的表面上,不需要其他步骤即可访问它。每个机器人只有一个“杀死开关”,对于多个机器人,每个机器人都会有自己的“杀死开关”。它应轻松快速地易于访问和激活。未经工作人员授权禁用“杀戮开关”,应导致安全取消资格。紧急停止按钮必须停止施工机器人的运动,并在按钮上按下一个按下动力。它必须高度可靠和瞬时。由于这些原因,需要一个未修改的“商业现成”(COTS)红色按钮。只要它保持开放才能禁用机器人,就允许向机械继电器进行封闭的控制信号。此规则存在,以便在发生火灾或其他事故的情况下可以安全地设置施工机器人。该按钮应与所有控制器(高电流,叉车类型按钮)断开电池连接,并且也应将电池从其余的活动子系统中隔离。如果由自己的独立的内部计算机电池供电,则只有在板载笔记本电脑和数据库中可以保持动力。3.1.12机器人必须提供自己的车载电源。没有设施功率例如:在板载板上只有一个小电池可以接受,该电池只能为A(ex :) Raspberry Pi(或平等)控制计算机提供动力,并且其功率不会流经主机器人杀死开关。

交流和直流驱动器、伺服器和电机
成功的驱动器集成项目的关键在于驱动器的灵活性、其选项、其板载智能以及可以定制以适应的不同级别。通过对机器或流程的清晰理解,我们的驱动器工程师可以定制解决方案平台以提供完全正确的集成解决方案 - 不多不少。驱动器及其功能的灵活性使驱动器与应用完美匹配 - 并且最具成本效益。• 驱动器解决方案平台跨行业和应用的多功能性• 调整和扩展解决方案以经济高效地匹配应用• 现场总线灵活性以使用您的语言• 可扩展的“基于驱动器”PLC 智能以释放驱动器技术的真正力量
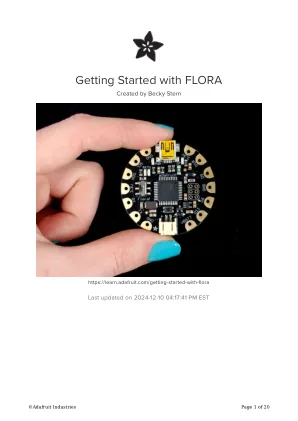
开始使用 FLORA
Flora 最容易混淆的部分是 VBATT 垫以及 Flora 中如何处理电源管理。我们设计了 flora 主要通过 JST 连接器供电。您可以使用电池组或锂电池为其供电。该输入具有极性保护,也可通过开/关开关控制。开关后的电池输出为 VBATT 。您不应使用 VBATT 作为输入,因为如果您还将 USB 连接器插入计算机,可能会损坏电池!VBATT 的理想用途是当您想要为 NeoPixels 或伺服器等设备供电时,这些设备需要超过板载调节器提供的 150mA 的电流。