XiaoMi-AI文件搜索系统
World File Search System查看的
执行原则工作组关于最后审查的报告
GFXC 执行原则工作组关于最后查看的报告 1. 简介 最后查看是电子交易活动中使用的一种做法,根据该做法,收到交易请求的市场参与者有最后一次机会根据报价接受或拒绝该请求。这种做法一直是业内讨论的主题。外汇全球准则(以下简称“准则”)的原则 17 专门涵盖了最后查看的主题。1 继 2017 年 5 月首次发布准则后,全球外汇委员会 (GFXC) 于 2017 年 12 月修订了原则 17 的文字,以提供更严格的最后查看窗口期间交易活动的指导。2 GFXC 于 2019 年 2 月发布了一份关于此类“补仓和交易”交易活动的后续报告。3 尽管发布了这份材料,但当 GFXC 于 2019 年就准则三年审查的合适关注领域对市场参与者进行调查时,最后查看的做法获得了最多的反馈。许多市场参与者仍然对最后观望做法存在疑问和担忧,对这个话题的看法也仍然各异。受访者指出,关于最后观望做法的事前披露的质量和细节可能有很大差异,包括流动性提供者用于价格检查的方法以及与此相关的最后观望窗口的长度。受访者还寻求更清楚地披露最后观望窗口期间“补仓和交易”活动的使用情况。受访者要求更清楚地说明如何适当处理被拒绝的交易信息,并且,为了提高流动性消费者评估其交易执行的能力,希望更容易获得交易信息(包括交易被拒绝的原因)。本文由GFXC编写,旨在促进更广泛地了解和理解最后观望、它在外汇市场运作中发挥的作用以及最后观望作为一种做法的适当应用。本文最后提出了三项建议,以帮助解决GFXC早期调查中表达的担忧:- 流动性提供者应确保公平有效的最后观望流程;- 流动性提供者应加强事前披露; - 应提供信息来评估交易请求的处理。本文应与《守则》一起阅读,特别是附录 A 中包含的原则 17。在对《守则》的三年审查中,GFXC 同意原则 17 的文本仍然适用。本指导文件不是《守则》的一部分。众所周知,该主题本质上是技术性的,并且对该实践的具体方面存在广泛的意见;因此,本文以原则为重点,并非旨在规定。

yihao liu div>
- 机器人[link]和AR [link]辅助医疗程序| C ++,Python,C#,Matlab,Ros,Unity,VTK O完成了机器人TMS的原型,并将其用于初步的内部临床试验和神经科学研究。o开发了用于TMS目标计划和医疗图像查看的神经运动系统。 o开发了具有用于KUKA LBR7 IIWA控制[repo]的功能模块的集成[请求演示]硬件[repo],手眼校准[2,8],工具校准[2],动力学建模[7],用户界面,用户界面和网络[repo,repo,repo]。 o开发的AR系统[2,9]提供了碰撞检测线索,并能够进行人体工程学的计划和执行。 o撰写了学术出版物[2,5,7-9,13,14]和专利申请,并在会议上介绍。 o将这些技术和系统应用于其他侵入性程序,例如股骨成形术,脊柱融合和颅面手术。o开发了用于TMS目标计划和医疗图像查看的神经运动系统。o开发了具有用于KUKA LBR7 IIWA控制[repo]的功能模块的集成[请求演示]硬件[repo],手眼校准[2,8],工具校准[2],动力学建模[7],用户界面,用户界面和网络[repo,repo,repo]。o开发的AR系统[2,9]提供了碰撞检测线索,并能够进行人体工程学的计划和执行。o撰写了学术出版物[2,5,7-9,13,14]和专利申请,并在会议上介绍。o将这些技术和系统应用于其他侵入性程序,例如股骨成形术,脊柱融合和颅面手术。

在线映射工具的用户指南
首次启动映射工具时,您将在左侧显示弹出窗口。请阅读弹出窗口,然后单击“确定”。请注意,由于该平台可详细查看的数据量,层可能需要一些时间来查看 - 取决于互联网速度和计算机规格,最多可能需要2分钟,因此请耐心等待。如果它延伸了2分钟,则值得刷新页面。任何访问该工具的问题,请发送电子邮件至makingspacefornature@kent.gov.uk,一旦单击确定,您将访问映射平台。通过使用本指南中详细介绍的各种映射功能,您将能够使用在线平台查看:•所有映射的潜在措施。•对于生物多样性特别重要的领域

2023 年 CTMA 技术竞赛
因为您在此处查看的竞赛手册已以印刷版和 NCMS 网站的形式向公众提供。竞赛的六名决赛选手将获得更大的曝光率(完整名单见第 12-13 页),他们计划在 2023 年 CTMA 合作伙伴会议上展示他们的创新解决方案。在此次活动期间,将宣布总奖得主和人民选择奖得主,每人将获得 50,000 美元的项目资金。这笔资金将在现有 CTMA 合作协议允许的范围内用于选定的国防部演示活动。本次竞赛中提交的技术有可能在行业中采用并在整个国防部实施,从而实现知识、经验和专业知识的快速转移,以确保美国工业基础的持续强大。
硬膜下血肿和计算机断层扫描的帮助
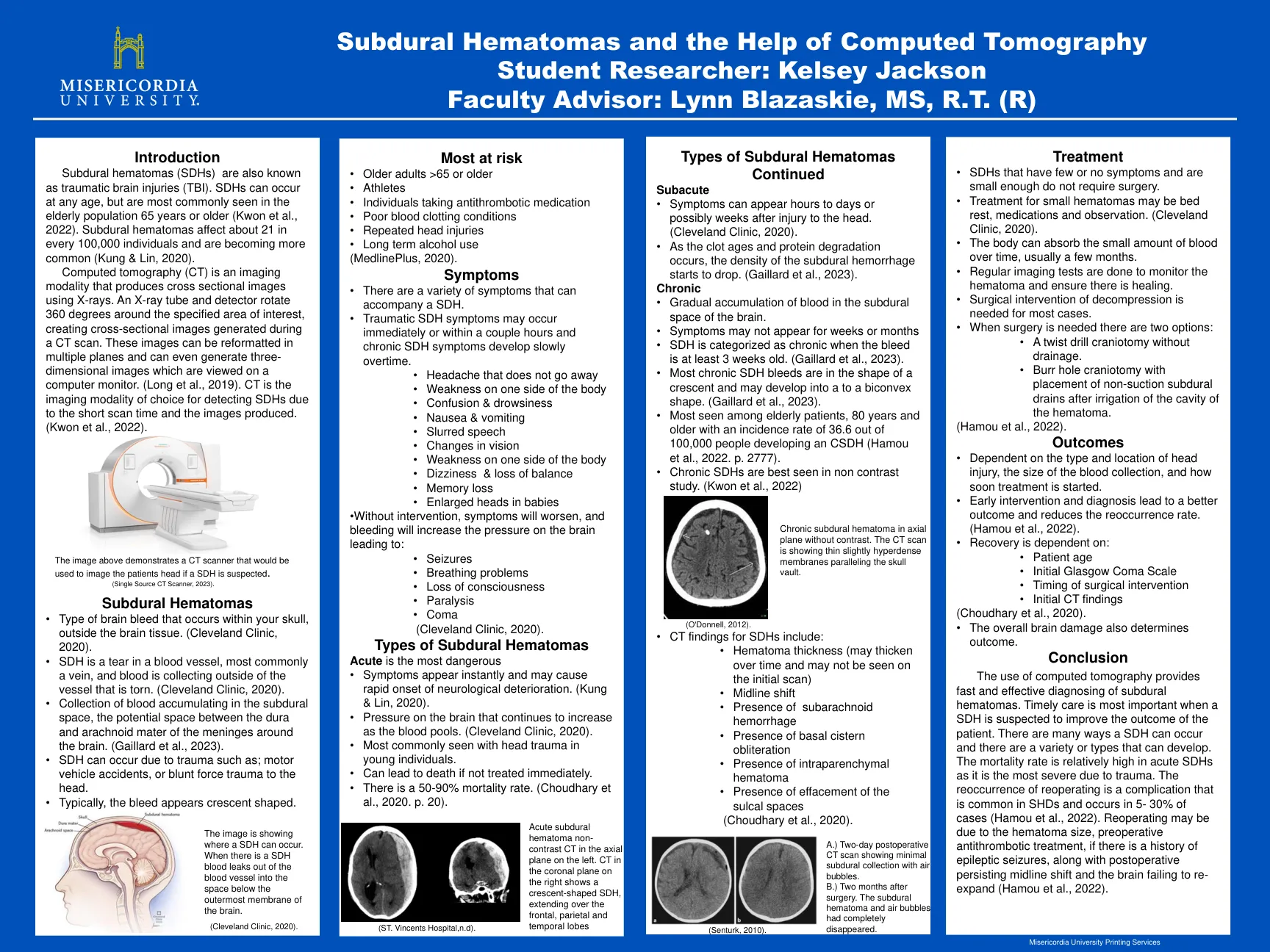
引言下膜血肿(SDHS)也称为创伤性脑损伤(TBI)。SDH可以在任何年龄发生,但最常见于65岁或以上的老年人口(Kwon等,2022)。硬膜下血肿每100,000个人中约21个,并且变得越来越普遍(Kung&Lin,2020)。计算机断层扫描(CT)是一种成像方式,可使用X射线产生横截面图像。X射线管和检测器围绕感兴趣的区域旋转360度,从而在CT扫描过程中产生横截面图像。这些图像可以在多个平面中重新格式化,甚至可以生成在计算机监视器上查看的三维图像。(Long等,2019)。ct是由于短扫描时间和产生的图像而检测SDHS的首选成像方式。(Kwon等,2022)。

E1 和 E2 脑板数据表
groov EPIC 处理器已准备好运行您需要的软件:• 编程:选择基于流程图的 PAC 控制、符合 IEC61131-3 标准的程序的 CODESYS 开发系统或用于自定义应用程序的安全 shell 访问 (SSH) 到 Linux 操作系统• Node-RED 用于从预构建节点创建简单的 IIoT 逻辑流• 使用字符串或 Sparkplug 数据格式进行高效的 MQTT 数据通信• 多个 OPC UA 服务器选项• HMI:groov View 用于构建您自己的可在触摸屏、PC 和移动设备上查看的 HMI;PAC Display 用于 Windows HMI;Node-RED 仪表板 UI• Inductive Automation 的 Ignition 或 Ignition Edge®(需要购买许可证),带有 OPC-UA 驱动程序到 Allen-Bradley®、Siemens® 和其他控制系统以及 MQTT 通信

人工智能在营销中的应用:其影响和未来
人工智能 (AI) 是一个已经接管了世界各个领域的概念,无论是医学、建筑、教育、商业、娱乐还是营销。我们生活在一个数据收集、分析和推理与呼吸一样重要的世界。每一个数据,无论大小,都会被企业存储和使用。以 Instagram 用户为例。用户在特定 Instagram ID 上观看的卷轴和帖子会被捕获和存储。下次用户打开其 Insta 页面时,与他们之前查看的内容相关的帖子会出现在顶部。同样,如果用户滚动浏览了某个特定的促销帖子,AI 软件会捕获此数据并在页面上充斥类似的促销信息。所有这些都在一纳秒内完成。这就是 AI 的力量。

基于视觉的无人机控制硬件在环仿真平台
由于无人机系统精密且昂贵,测试期间存在财产损失风险以及政府法规,因此设计和测试无人机的控制算法非常困难。这需要对控制器进行大量模拟以确保稳定性和性能。但是,模拟无法捕捉飞行控制的所有方面,例如传感器噪声和执行器滞后。出于这些原因,使用硬件在环仿真 (HILS) 平台。本文介绍了一种用于无人机视觉控制的新型 HILS 平台。该 HILS 平台由虚拟现实软件组成,可生成投射到屏幕上并通过摄像头查看的逼真场景。飞行硬件包括一架无人机,其机载自动驾驶仪与虚拟现实软件接口。该无人机可安装在风洞中,通过伺服翼型来调节姿态。� 2009 Elsevier Ltd. 保留所有权利。

量子场理论中的纠缠结构。 ii。通过局部
通过探测器观察量子场时,仅访问空间分离的本地区域的混合状态(一种无处不在的实验设计)时,可以限制访问分布式纠缠的全部范围的能力,并受经典相关性的笼罩。通过对两个检测贴片外部的田间测量进行投影测量,并在经典上传达结果,可以确定其纠缠量化的基本纯状态。在自由标量场真空的高斯连续变量状态中,该协议发现了在该场内建立的空间类似纠缠与可局部可检测的空间纠缠之间的差异。发现这种差异随着观察区域之间的分离而成倍增长。从本文中的洞察力和实用指南中所提供的协议,以阐明从一对本地观察者的Vantage查看的量子线相关性的不可避免的失真。

艾伦大脑天文台:视觉行为2p
一旦小鼠在任务中受过良好的训练,它们会过渡到执行任务,同时使用2光子显微镜成像,以同时测量神经活动和行为。在实验的成像部分中,小鼠在训练过程中查看的八个自然场景图像以及在单独的课程中以前从未见过的八个图像进行了任务。这允许评估新颖性对刺激和行为信息的神经编码的影响。小鼠在成像阶段还进行了被动观看会话,在会议前将小鼠给出了每日水(因此被满足),并通过舔嘴撤回的任务刺激,因此他们无法获得水的回报。最后,仅在成像会话中,刺激被省略了5%的概率,破坏了闪烁的图像呈现的预期节奏。刺激变化和紧接变化之前的刺激从未被省略。