XiaoMi-AI文件搜索系统
World File Search System框架结构
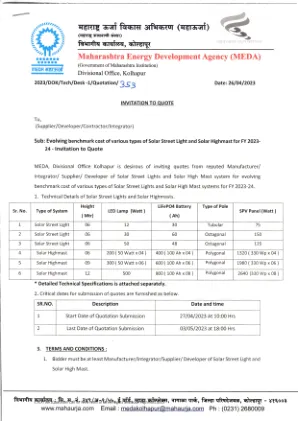
马哈拉施特拉邦能源发展局(MEDA)
I.应将耐腐蚀的金属框架结构固定在杆上,以保持SPV模块。II。 框架结构应具有配置,以便可以以合适的倾斜角度定向模块。 iii。 杆应按IS1161和IS4736即进行热浸镀锌管 B类。IV。 极高的高度在地面高度为5 m,在地面以下1 m。 灯具应至少高4.5 m。 V.杆应该有保留灯具的规定。 vi。 电池应包含在灯具外壳中,该电池应进行防水(IP 65)和耐腐蚀性,或在通风,防酸和耐腐蚀的,耐热的金属盒(IP 65)中的通风耐酸和耐腐蚀的弹药外壳中,并带有防theft锁定装置,以供户外使用。II。框架结构应具有配置,以便可以以合适的倾斜角度定向模块。iii。杆应按IS1161和IS4736即B类。IV。 极高的高度在地面高度为5 m,在地面以下1 m。 灯具应至少高4.5 m。 V.杆应该有保留灯具的规定。 vi。 电池应包含在灯具外壳中,该电池应进行防水(IP 65)和耐腐蚀性,或在通风,防酸和耐腐蚀的,耐热的金属盒(IP 65)中的通风耐酸和耐腐蚀的弹药外壳中,并带有防theft锁定装置,以供户外使用。B类。IV。极高的高度在地面高度为5 m,在地面以下1 m。灯具应至少高4.5 m。V.杆应该有保留灯具的规定。vi。电池应包含在灯具外壳中,该电池应进行防水(IP 65)和耐腐蚀性,或在通风,防酸和耐腐蚀的,耐热的金属盒(IP 65)中的通风耐酸和耐腐蚀的弹药外壳中,并带有防theft锁定装置,以供户外使用。

2016 4Runner 电子手册 - 丰田认证
您必须赢得称自己为越野偶像的权利。2016 款丰田 4Runner 为您的下一次冒险带来了超过三十年的成熟性能,因此它拥有您可以信赖的东西,可以帮助您逃离城市——如果您愿意,也可以返回。强大的 V6 和加强型车身框架结构为您提供了应对野外挑战所需的力量,而大胆的造型也有助于赢得您在野外遇到的一切的尊重。凭借其宽敞的内部空间和可用的 Entune™ 高级音响,集成导航 1 和应用套件 2,4Runner 可帮助您减少颠簸。是时候开始下一个伟大的篝火故事了。让我们去各地吧。

搜索和实验验证...
本文提出了一种新型搜救遥控机器人(ROV)系统的设计方案,其目标是实现水下目标搜索探测和小目标捕获及救援作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行设计分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了多种水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。
如何引用本文:Sun B, Pang W, Chen M, Zhu D. Development and Experimental Verify of Search and Rescue ROV. Intell Robot 2022;2(4):355-70. http://dx.doi.org/10.20517/ir.2022.23。
本文提出了一种新型搜救遥控机器人(ROV)系统的设计,目标是实现水下目标搜索探测和小目标抓捕及救援的作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行了设计与分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了不同类型的水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。
2016 4Runner 电子手册 - 丰田认证
您必须赢得称自己为越野偶像的权利。2016 款丰田 4Runner 为您的下一次冒险带来了超过三十年的成熟能力,因此它拥有您可以信赖的东西,可以帮助您逃离城市——如果您愿意,也可以返回。强大的 V6 和加固的车身框架结构为您提供了应对野外挑战所需的力量,而激进的造型也有助于赢得您在野外遇到的一切的尊重。凭借其宽敞的内部空间和可用的 Entune™ 高级音响,集成导航 1 和应用套件 2,4Runner 可帮助让崎岖的道路变得不那么崎岖。是时候开始创造下一个伟大的篝火故事了。让我们去吧。
GROUP-12 消防局官员(级别
施工作业安全地下工程:- 挖掘、钻井和爆破、开沟、支撑、打桩以及与上述组件相关的机械和设备的使用和操作安全,地上工程:脚手架、定心、框架结构、梯子、混凝土墙和地板开口、楼梯和栏杆。钢结构工程,包括焊接、切割安装等。相关机械设备的使用安全,水下作业:排水、下井、沉箱、水下混凝土。与灌溉工程相关的围堰和特殊作业。相关机械设备的使用、材料和人员的移动:重型/长型物品、铁路货车、卡车、车辆和危险品等。高层建筑、桥梁、道路、铁路、沥青、气压沉箱、电气设备和升降机。防火和保护:爆炸物处理。预防措施。
定向能量沉积单元的设计考虑因素
摘要。设置机器人增材制造机器需要注意几个安全方面,包括不同系统的集成、功能工作区、人机界面和操作的便利性。本文介绍了在设计和组装机器人增材制造单元时应考虑的一些主题。它基于在 SINTEF Manufacturing 的增材制造实验室中设计和组装混合 DED 和研磨单元的经验。该单元旨在确保机器人和增材制造构建单元的安全稳定运行,为实现这一点,它采用钢框架结构,覆盖钢板,并配备通风系统、防激光窗和卷帘门。设计并集成了一个安全系统,以确保单元中运行的不同元件之间的通信和安全机制的协调。

INSA 杰出讲座-2 获奖者
化学 Natarajan, Srinivasan(生于 1960 年 5 月 27 日)博士,印度科学研究所班加罗尔固态和结构化学部。因其在无机材料化学领域的杰出和持续贡献而获提名,特别是在框架结构化合物的基本理解、确定金属有机骨架 (MOF) 合成的新中间体和途径、研究动力学和热力学因素在其形成中的作用、开创性地将 MOF 用于金属中心发光、溶剂依赖性室温铁电行为、异相催化以及作为陶瓷合成前体、研究锂正极电池材料、无机颜料、新型电催化剂和非线性光学材料,以及在四面体环境中稳定过渡金属离子方面。

基于 PLC 的带倾斜装置的太阳能电池板
目前,许多替代能源似乎在技术上是可行的。其中之一就是太阳能(Kreider 和 Kreith,1981 年)。太阳能电池板是基本的太阳能转换组件。传统的太阳能电池板以一定的角度固定,限制了它们在一天中接受太阳照射的面积 [1-3]。因此,平均太阳能并不总是最大化。最初,由于地球在太阳系中的位置,太阳能电池板被放置在 23.5 度。根据太阳的位置倾斜电池板的程序由 PLC 提供。固定在电池板后面的倾角仪测量电池板的角度,并将反馈给 PLC[4,5]。PLC 控制电机为倾斜电池板的机构提供动力。太阳能电池板每小时在一分钟内倾斜九度。任何对现有程序的更改都可以通过人机界面进行修改。主要目的是分析框架结构对各种风力条件的影响[6,7]。