机构名称:
¥ 1.0
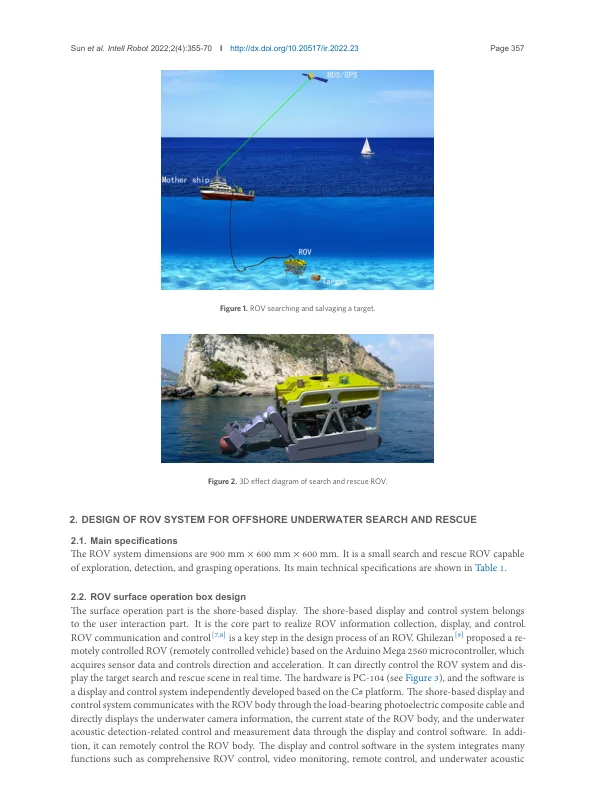
本文提出了一种新型搜救遥控机器人(ROV)系统的设计方案,其目标是实现水下目标搜索探测和小目标捕获及救援作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行设计分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了多种水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。
搜索和实验验证...
主要关键词


相关文件推荐