XiaoMi-AI文件搜索系统
World File Search System模型

人工智能驱动的预测模型和...
1 弗莱堡大学医学中心骨科和创伤外科系,弗莱堡大学医学院,弗莱堡 79108,德国;sara.uelkuemen@hotmail.de(S.Ü.);pm.obid@gmail.com(PO);gernotmichaellang@gmail.com(GML)2 洛雷托医院脊柱外科系,弗莱堡 79100,德国;frank.hassel@rkk-klinikum.de(FH);alisia.zink@gmail.com(AZ)3 帕拉塞尔苏斯医科大学实验神经再生研究所、脊髓损伤和组织再生中心萨尔茨堡(SCI-TReCS),奥地利 5020 萨尔茨堡; s.couillard-despres@pmu.ac.at 4 海德堡大学医院口腔颌面外科系,69120 海德堡,德国;veronika.shavlokhova@med.uni-heidelberg.de 5 奥地利组织再生集群,1200 维也纳,奥地利 6 医学情报与信息学,慕尼黑工业大学医学院 Rechts der Isar 医学中心,81675 慕尼黑,德国;martin.boeker@tum.de * 通信地址:babak.saravi@jupiter.uni-freiburg.de

在快速发展的大流行中部署人工智能模型的挑战
胡一鹏 1,2,4 约瑟夫·雅各布 1,3 杰弗里·JM·帕克 1,5,6 大卫·J·霍克斯 1,2,4 约翰·R·赫斯特 3 丹奈尔·斯托亚诺夫 1,2,5 1 伦敦大学学院医学图像计算中心,2 威康/EPSRC 介入和外科科学中心,3 伦敦大学学院呼吸科,4 医学物理和生物医学工程系,5 计算机科学系,伦敦大学学院,Gower Street,伦敦 WC1E 6BT,英国 6 Bioxydyn Limited,Pencroft Way,曼彻斯特,M15 6SZ,英国 通信:yipeng.hu@ucl.ac.uk 由严重急性呼吸系统综合症冠状病毒 2 引起的 COVID-19 大流行,发生在一个被基于大数据、计算能力和神经网络的人工智能(AI)迅速改变的世界。近年来,这些网络的目光越来越多地转向医疗保健领域的应用。COVID-19 是一种全球性疾病,对健康和经济造成破坏,或许不可避免地会吸引全球学术界和工业界的计算机科学家的关注和资源。AI 支持应对疫情的潜力已在广泛的临床和社会挑战 [1] 中提出,包括疾病预测、监测和抗病毒药物发现。随着疫情对世界人民、工业和经济的影响不断扩大,这种情况可能会持续下去,但对当前疫情的一个令人惊讶的观察是,迄今为止,AI 在 COVID-19 管理中的影响有限。本通讯重点探讨了在前线医疗服务中未能成功采用为 COVID-19 诊断和预后开发的 AI 模型的潜在原因。我们强调了模型在疫情的不同阶段必须解决的不断变化的临床需求,并解释了将模型转化为反映当地医疗环境的重要性。我们认为,基础研究和应用研究对于加速人工智能模型的潜力都至关重要,在迅速发展的疫情期间尤其如此。 从这个角度看,对 COVID-19 的反应,或许可以让我们一窥全球科学界应如何应对未来的疾病爆发,以更有效地应对。

大型语言模型策略适应到处驾驶
将驾驶行为适应新的环境,库斯和法律是自主驾驶中的一个长期问题,排除了澳大利亚车辆(AVS)的广泛部署。在本文中,我们提出了LLADA,这是一种简单而强大的工具,它使人类驾驶员和自动驾驶汽车都可以通过调整其任务和动作计划来在新的地方进行访问规则,从而在任何地方开车。llada通过利用大型语言模型(LLMS)在解释本地驾驶员手册中的流量规则方面的令人印象深刻的零弹性可推广性来实现这一目标。通过广泛的用户研究,我们表明LLADA的说明可用于消除野外野外未受的情况。我们还展示了LLADA在现实世界数据集中适应AV运动计划策略的能力; Llada优于我们所有指标的基线计划。请查看我们的网站以获取更多详细信息:Llada。

弥合扩散模型之间的差距和图像压缩的通用量化
通过利用量化误差和加性噪声之间的相似性,可以通过使用扩散模型“ denoise”量化引入的伪影来构建基于扩散的图像压缩编解码器。但是,我们确定了这种方法中的三个差距,从而导致量化的数据排除在扩散模型的分布之外:噪声水平,噪声类型和由离散化引起的差距的差距。为了解决这些问题,我们提出了一个新型的基于量化的正向扩散过程,该过程是理论上建立的,并桥接了上述三个差距。这是通过经过精心量身定制的量化时间表以及对均匀噪声训练的扩散模型来实现的。与以前的工作相比,我们提出的架构也会产生一贯的现实和详细的结果,即使是在极低的比特率下,同时保持对原始图像的忠诚度。

recore:正式化对比度表示世界模型
虽然最近的无模型增强学习(RL)方法已经证明了人类水平在游戏环境中的有效性,但它们在视觉导航等日常任务中的成功受到了限制,尤其是在很明显的外观变化下。此限制来自(i)样本效率不佳和(ii)对培训方案的过度效果。为了应对这些挑战,我们提出了一种世界模型,该模型使用(i)对比不受监督的学习和(ii)干预不变的统治者学习不变特征。学习世界动态的明确表示世界模型,提高样本效率,而对比度学习隐含地实施不变特征的学习,从而改善了概括。,随着对比的损失与世界模式的na'整合还不够好,因为基于世界模型的RL方法独立地优化表示表示和代理策略。为了克服这个问题,我们提出了一种干预 - 不变的正规剂,其形式是辅助任务,例如深度预测,图像DeNoising,图像分割等,以明确执行不变性以进行样式的干预。我们的方法优于当前基于最新的模型和不含模型的RL方法,并显着改善了IGIBSON基准测试中评估的分数范围内导航任务。仅使用视觉观察,我们进一步证明了我们的方法超过了最近的语言引导导航基础模型,这对于在计算功能有限的机器人上部署至关重要。最后,我们证明了我们提出的模型在吉布森基准上其感知模块的SIM到真实传输方面表现出色。
安全协议和数据模型(SPDM)体系结构白皮书
10实施本标准或拟议标准的某些要素可能受第三方专利权的约束,包括临时专利权(此处“专利权”)。dmtf不向标准用户陈述有关此类权利的存在,也不承担承认,披露或确定任何或所有此类第三方专利权所有者或索赔人,也不对任何不完整或不准确的认同或不准确的认同或披露此类权利,所有者,所有者或索赔人。dmtf不应以任何法律理论,无论采用任何方面的任何方面或任何情况,都无法承认,披露或确定任何此类第三方专利权,或者对于该方在其产品,协议或测试程序中对标准或其成立的依赖。dmtf对任何执行此类标准的一方不承担任何责任,无论是否可以预见,对任何专利所有人或索赔人都不承担任何责任,并且如果出版后撤回或修改了标准的成本或损失,并且在出版后撤回或修改了损失,并且由任何人予以实施的任何一方无害,以任何人的索赔代理和所有所有者的索赔。

lami:多模式人类机器人互动的大型语言模型
无缝的人类机器人相互作用(HRI)需要机器人对人类的多模式输入的熟练处理,包括语音,凝视和面部表情,以准确评估人类的影响并相应地提供帮助。同时,机器人必须通过多模态输出渠道清楚地将自己的意图清楚地传达给人类,包括语音,手势和凝视。传统上,在机器人系统中实现此功能通常需要复杂的设计。在意图估计的领域中,以前的研究通常合并意图识别模块,以基于多模式输入[3,17]对人类意图进行分类。一些系统还具有用于检测人类情感状态的专用模块,对于建立社会细微差别的互动至关重要[10,16,18]。但是,这些方法的缺点在于它们耗时且昂贵的培训过程。在输出方面,许多先前的系统集成了情绪状态[8,11]模块,以控制人形输出提示,例如音调,凝视或面部表情,增强了向人类反馈的透明度和生动性。关于运动产生,提出了多种方法,包括预先建立的运动集的混合和图表[19,25],以及使用运动捕获数据[5,9,15]。值得注意的是,这涉及与特定状态相关的每种输出模式的动作手动设计。通过利用文本理解,推理和计划的能力,在短时间内提出了许多机器人应用[7,12,14,20,21,28]。例如,Zhang等人。大型语言模型(LLM)的最新进展,诸如聊天机器人,数据过程和代码生成之类的域中的表现令人印象深刻的功能正在揭示其在机器人技术领域的潜在应用。其中一个通常的例子是“ Saycan”机器人[1],它能够解释人的自然语言命令,分析环境并生成具体的可执行操作序列,以通过使用LLMS来满足人类的要求。但是,机器人和人之间的互动提示仅限于语音命令,即使没有语音输出。最近,一些研究人员还试图将这种技术应用于HRI领域。利用LLM来估计人类有多少信任机器人[30]; Yoshida等人,使用LLMS生成低级控制命令来推动人形机器人运动以进行社会表达[29],而不是用于实践援助。Baermann等人,部署了LLM不仅遵循人类的言语命令,而且还通过人类的自然语言反馈来纠正其错误[2]。然而,通信主要依赖语音相互作用,而较少关注多模式感应和表达能力。ye等。[27]驱动了一个LLM驱动的机器人系统,该系统能够与人类在VR环境中的组装任务中合作。,但是该系统仅限于处理人类语言输入并控制虚拟空间中的单臂。通常,与快速
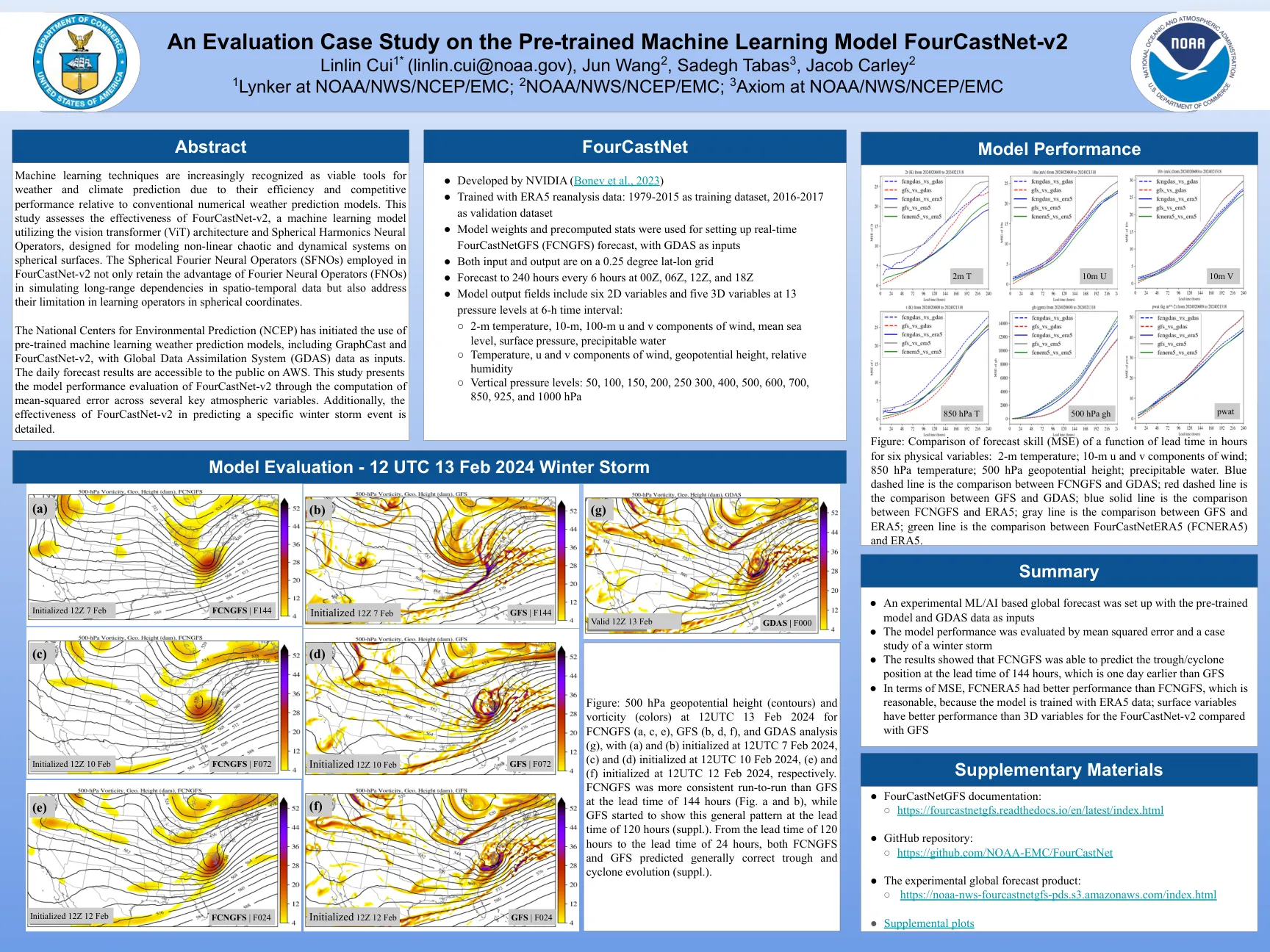
对预训练的机器学习模型四castnet-v2
机器学习技术越来越多地被认为是可行的天气和气候预测工具,因为它们相对于传统的数值天气预测模型,其效率和竞争性能。这项研究评估了使用视觉变压器(VIT)结构和球形谐波神经操作员的机器学习模型的有效性,该模型旨在建模球形表面上的非线性混沌和动力学系统。四castnet-v2中使用的球形傅立叶神经操作员(SFNO)不仅保留了傅立叶神经操作员(FNOS)在模拟时空数据中的长距离依赖性方面的优势,而且还解决了球形坐标中学习操作员的限制。