机构名称:
¥ 1.0
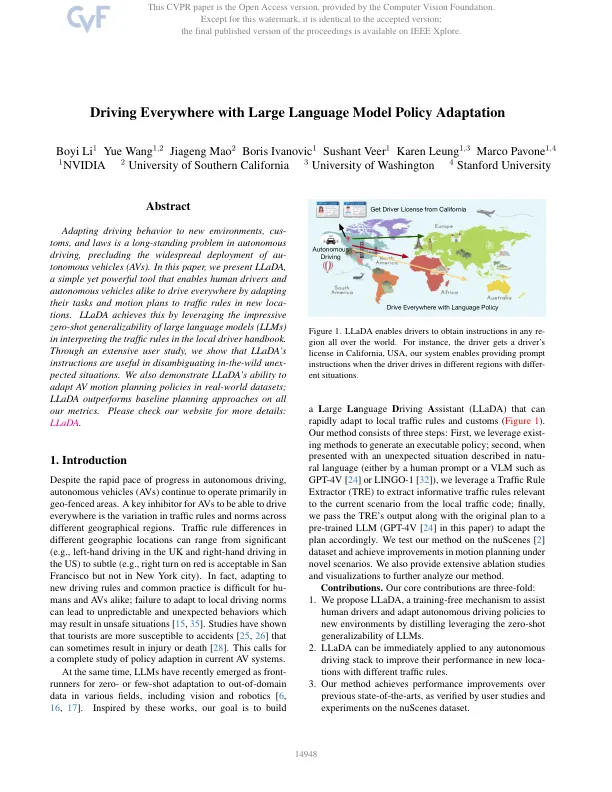
将驾驶行为适应新的环境,库斯和法律是自主驾驶中的一个长期问题,排除了澳大利亚车辆(AVS)的广泛部署。在本文中,我们提出了LLADA,这是一种简单而强大的工具,它使人类驾驶员和自动驾驶汽车都可以通过调整其任务和动作计划来在新的地方进行访问规则,从而在任何地方开车。llada通过利用大型语言模型(LLMS)在解释本地驾驶员手册中的流量规则方面的令人印象深刻的零弹性可推广性来实现这一目标。通过广泛的用户研究,我们表明LLADA的说明可用于消除野外野外未受的情况。我们还展示了LLADA在现实世界数据集中适应AV运动计划策略的能力; Llada优于我们所有指标的基线计划。请查看我们的网站以获取更多详细信息:Llada。
大型语言模型策略适应到处驾驶
主要关键词




相关文件推荐