机构名称:
¥ 1.0
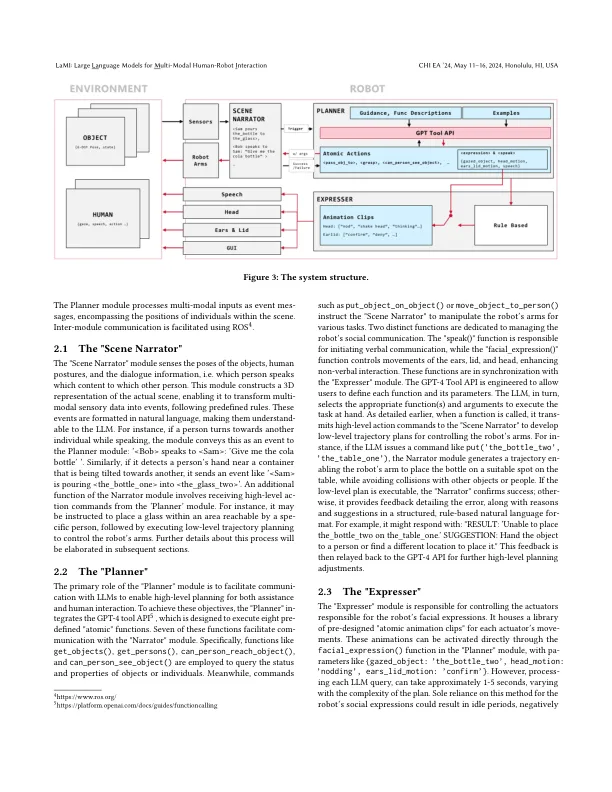
无缝的人类机器人相互作用(HRI)需要机器人对人类的多模式输入的熟练处理,包括语音,凝视和面部表情,以准确评估人类的影响并相应地提供帮助。同时,机器人必须通过多模态输出渠道清楚地将自己的意图清楚地传达给人类,包括语音,手势和凝视。传统上,在机器人系统中实现此功能通常需要复杂的设计。在意图估计的领域中,以前的研究通常合并意图识别模块,以基于多模式输入[3,17]对人类意图进行分类。一些系统还具有用于检测人类情感状态的专用模块,对于建立社会细微差别的互动至关重要[10,16,18]。但是,这些方法的缺点在于它们耗时且昂贵的培训过程。在输出方面,许多先前的系统集成了情绪状态[8,11]模块,以控制人形输出提示,例如音调,凝视或面部表情,增强了向人类反馈的透明度和生动性。关于运动产生,提出了多种方法,包括预先建立的运动集的混合和图表[19,25],以及使用运动捕获数据[5,9,15]。值得注意的是,这涉及与特定状态相关的每种输出模式的动作手动设计。通过利用文本理解,推理和计划的能力,在短时间内提出了许多机器人应用[7,12,14,20,21,28]。例如,Zhang等人。大型语言模型(LLM)的最新进展,诸如聊天机器人,数据过程和代码生成之类的域中的表现令人印象深刻的功能正在揭示其在机器人技术领域的潜在应用。其中一个通常的例子是“ Saycan”机器人[1],它能够解释人的自然语言命令,分析环境并生成具体的可执行操作序列,以通过使用LLMS来满足人类的要求。但是,机器人和人之间的互动提示仅限于语音命令,即使没有语音输出。最近,一些研究人员还试图将这种技术应用于HRI领域。利用LLM来估计人类有多少信任机器人[30]; Yoshida等人,使用LLMS生成低级控制命令来推动人形机器人运动以进行社会表达[29],而不是用于实践援助。Baermann等人,部署了LLM不仅遵循人类的言语命令,而且还通过人类的自然语言反馈来纠正其错误[2]。然而,通信主要依赖语音相互作用,而较少关注多模式感应和表达能力。ye等。[27]驱动了一个LLM驱动的机器人系统,该系统能够与人类在VR环境中的组装任务中合作。,但是该系统仅限于处理人类语言输入并控制虚拟空间中的单臂。通常,与快速
lami:多模式人类机器人互动的大型语言模型
主要关键词



相关文件推荐