机构名称:
¥ 1.0
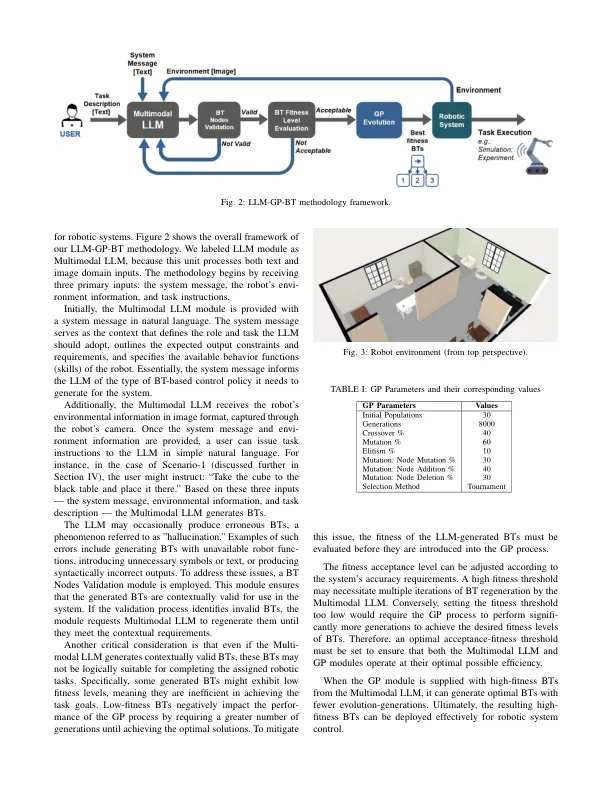
摘要 - 准确的任务计划对于控制自主系统(例如机器人,无人机和自动驾驶车辆)至关重要。行为树(BTS)被认为是任务计划中最突出的控制政策定义框架之一,由于其模块化,灵活性和可重复性。为机器人系统生成可靠,准确的基于BT的控制策略仍然具有挑战性,并且通常需要域专业知识。在本文中,我们提出了利用大语言模型(LLM)和遗传编程(GP)的LLM-GP-BT技术,以使BTS的生成和配置自动化。LLM-GP-BT技术处理以人类自然语言表达的机器人任务命令,并以计算效率和用户友好的方式将其转换为基于BT的准确和可靠的任务计划。该提出的技术是通过仿真实验系统地开发和验证的,这表明了其简化自主系统任务计划的潜力。
自动机器人任务计划通过将大型语言模型与基因编程集成
主要关键词



相关文件推荐