
机构名称:
¥ 1.0
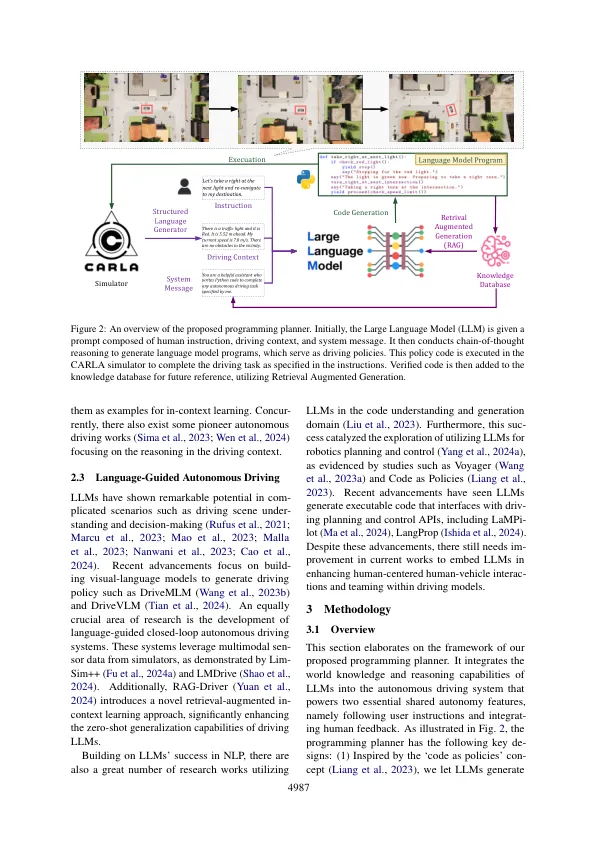
传统的自主驾驶系统主要集中于做出决策而无需人类互动,忽略了人类的决策和人类的偏好,并在复杂的交通情况下忽略了。为了弥合这一差距,我们引入了一个新颖的框架,利用大型语言模型(LLM)从各种模拟场景和环境中学习以人为反馈的方式学习以人为本的驾驶决策。我们的贡献包括一个基于GPT-4的程序MING计划者,该计划者与现有的Carla Simulator无缝集成以了解交通场景并对人类说明做出反应。具体来说,我们建立了人类指导的学习管道,该管道将人类驾驶员的反馈直接纳入学习过程,并存储最佳的驾驶编程政策,以检索增强发电(RAG)。令人印象深刻的是,我们的编程规划师只有50个保存的代码片段,可以匹配基线经过广泛训练的型系统模型(RL)模型。我们的论文强调了LLM驱动的共享自治系统的潜力,从而将自动驾驶系统开发的前沿变得更加互动和直观。
通过大型语言模型通过人类反馈学习自主驾驶任务
主要关键词



相关文件推荐





























