机构名称:
¥ 1.0
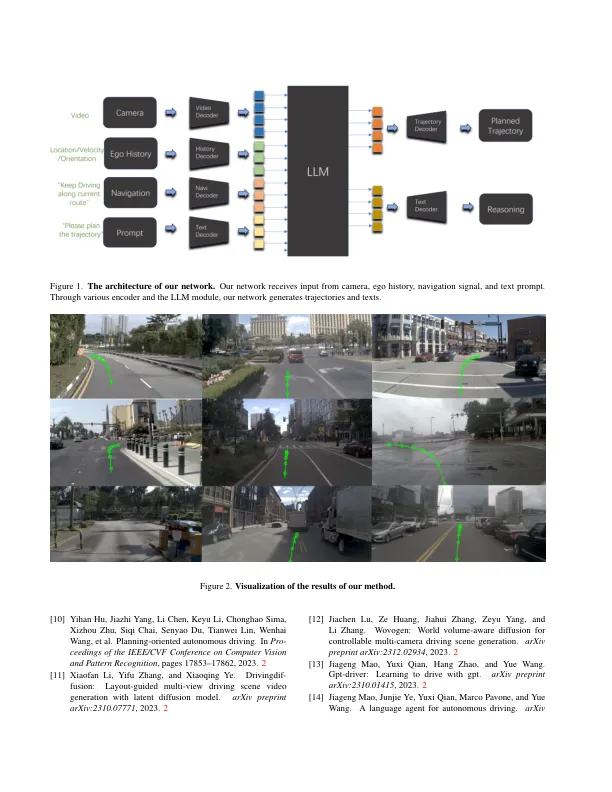
自主驾驶技术一直在迅速发展。主流体系结构涉及将整个管道分为几种不同的功能,例如感知,本地化和映射,预测,计划和控制。这个过程被认为是绩效,安全性和解释性之间的不错的权衡。但是,尽管驾驶员辅助系统(L2至L3)开始占据很大的市场份额,但高级(L4+)自主驾驶仍然落后于大规模生产。背后有几个原因:复杂的体系结构:当前的主流溶液具有二十次甚至更多模块。由于计算功率限制,单个模块的性能上限不高;系统中的内部接口太多,很难传输和优化。本地和整体优化目标有时需要冲突,因此很难观察到绩效的改进。高成本:随着模块数量的增加,研发/维护/人力成本飙升。重复发明,
使用视觉语言模型端到端自主驾驶
主要关键词


相关文件推荐