机构名称:
¥ 1.0
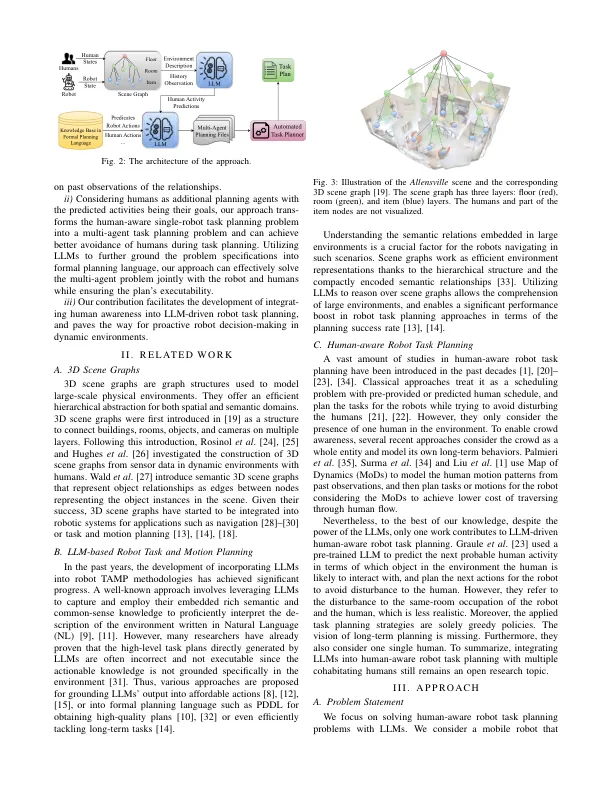
摘要 - 大语言模型研究(LLM)的最新突破引发了几个研究领域的转变。值得注意的是,LLM的集成在机器人任务和运动计划(TAMP)中的性能大大提高。然而,以前的方法经常忽略对动态环境的考虑,即,人类等动态对象的存在。在本文中,我们提出了一种新颖的方法来解决这一差距,通过将人类意识纳入基于LLM的机器人任务计划中。为了获得动态环境的有效表示,我们的方法将人类的信息整合到层次结构场景图中。为了确保计划的可执行性,我们利用LLMS将环境拓扑和可行的知识融入正式的计划语言中。最重要的是,我们使用LLM来预测未来的人类活动和计划任务为机器人考虑预测。我们的贡献促进了将人类意识纳入LLM驱动的机器人任务计划的发展,并为在动态环境中积极主动的机器人决策铺平了道路。
使用大语言模型
主要关键词


相关文件推荐