机构名称:
¥ 1.0
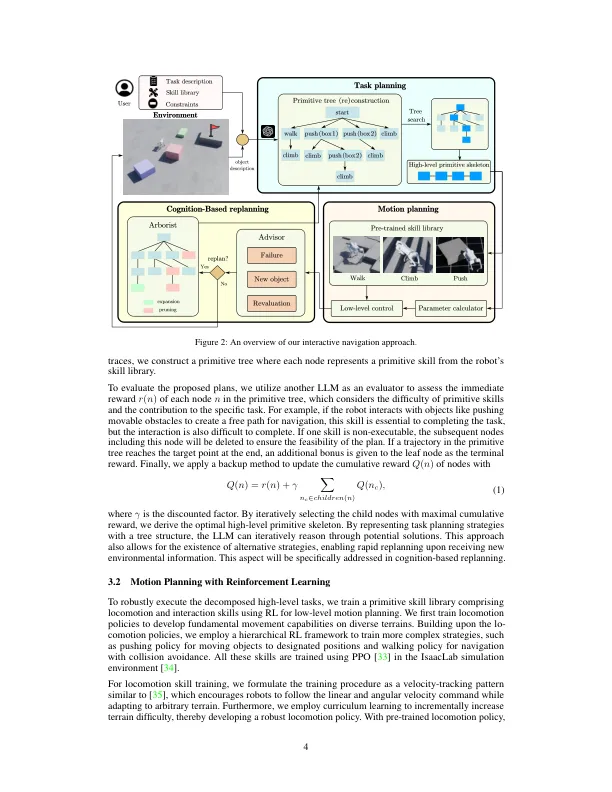
在复杂环境中的机器人导航仍然是一项关键的研究挑战。值得注意的是,由于四足机器人的地形适应性和移动敏捷性,四足动导航已取得了重大进展。但是,传统的导航任务将机器人限制在预定义的自由空间中,并专注于避免障碍物,从而限制了它们在更具挑战性的环境中的适用性,例如缺乏可行的目标途径的场景。我们提出了一种交互式导航方法,该方法利用敏捷四足动物的运动来适应各种地形并与环境互动,更改工作区以应对开放且复杂的环境中挑战性的导航任务。我们提出了一棵原始树,用于使用大语言模型(LLM)的高级任务计划,从而促进了长期任务的有效推理和任务分解。树结构允许添加动态节点和修剪,从而对新观测值进行自适应响应,并在导航过程中增强鲁棒性和实时性能。对于低级运动计划,我们采用强化学习来预先培训技能库,其中包含复杂的运动和互动行为,以执行任务。此外,我们引入了一种基于认知的重型方法,该方法由顾问和树木师组成,以应对实时自我的观察。该提出的方法已在多个模拟场景中得到了验证,该方法在不同的情况下阐明了其在各种情况下的有效性和在部分可观察的条件下的实时适应性。
使用大语言模型
主要关键词



相关文件推荐