XiaoMi-AI文件搜索系统
World File Search System模拟技术
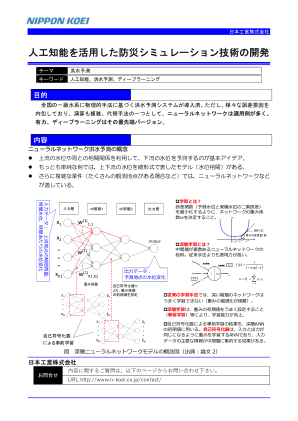
利用人工智能开发防灾模拟技术
1. 一琴、樱庭:利用多点观测信息的深度神经网络提高河流水位预测精度,河流工程学报,第23卷,2017年5月。 2. 一琴、樱庭:结合深度神经网络和分布式模型的混合河流水位预测方法,日本土木工程学会学报(B1),2017年3月。 3. 一琴、樱庭:应用深度学习提高神经网络洪水预测精度,河流工程学报,第22卷,2016年4月。 4. 一琴、樱庭、清:应用深度学习的河流水位预测方法的开发,日本土木工程学会学报(B1),2015年9月。 水利工程论文奖

药物研发和计算机模拟技术:简要回顾
从细胞、分子水平到整个动物水平。完成靶标验证后,需要鉴定出针对该靶标的有效化合物,例如抑制剂、调节剂或拮抗剂。此过程称为先导化合物鉴定,其中设计和开发合适的检测方法以监测对所研究靶标的影响 [7]。高通量筛选 (HTS) 在此阶段起着至关重要的作用,因为大量化合物会暴露于靶标。在一定置信度下显示出剂量依赖性靶标调节的化合物被进一步处理为先导化合物。随后,在实验室中对动物模型进行实验,然后对阳性结果的效力和选择性进行优化。在成为药物开发候选物之前,还会评估其物理化学性质及其药代动力学和安全性特征 [8]。尽管大多数过程都依赖于实验任务,但计算机模拟方法在该药物发现流程的每个阶段都发挥着重要作用(图 1)。

推进无创机械通气:模拟技术改善呼吸护理
呼吸衰竭是一种危重疾病,通常需要机械通气来支持或恢复正常呼吸。虽然有创机械通气 (IMV) 通常用于重症病例,但无创机械通气 (NIMV) 提供了一种侵入性较小的替代方案,可减少并发症,并可用于中度病例。COVID-19 大流行凸显了全球呼吸机短缺的问题,尤其是在中低收入国家 (LMIC),这些国家无法获得救生设备,加剧了危机。为了应对这些挑战,本文提出了一种简化的、基于隔室的 NIMV 模拟模型。该模型提供了一种实用且易于访问的工具,用于模拟各种通气模式下的呼吸系统行为,使用电路和肺生理学之间的类比。通过模拟气道阻力和肺顺应性等关键参数,该模型允许临床医生和研究人员评估呼吸机性能并优化治疗策略。此外,该模拟为开发可在资源受限环境中部署的经济高效、易于使用的 NIMV 系统提供了蓝图。我们的贡献旨在通过更好地设计和理解无创通气来解决呼吸机短缺的问题,最终改善中度呼吸衰竭患者的呼吸护理。

涡旋压缩机油循环率运动粒子模拟技术
摘要 我们开发了一种带有粒子运动分析的油循环率 (OCR) 模拟技术,可以定量评估涡旋压缩机中形状和结构的影响。显然,粒子运动分析有利于分析油雾行为。分析包括三个模拟。这些模拟有三个不同的喷射器,它们定义了粒子的起始位置。第一个在固定涡旋的排出口,另一个在涡旋压缩机底部的油池上。最后一个喷射器在电机顶部,这三个模拟计算从压缩机排放到循环单元的颗粒数量。阐明了涡旋压缩机内部油雾行为的机制,并且这些模拟使得在各种模型的情况下,大多数计算结果都在测得的 OCR 的 ± 1wt% 以内。
编辑复杂性先进计算机模拟技术在智能城市中处理的问题 2021
复杂性科学技术将为新的仿真研究领域不断拓展带来机遇,特别是对人体仿真、社会仿真、人脑仿真等,为社会治理、预测、城镇化等仿真提供前所未有的机遇。复杂性科学技术的发展为利用建模与仿真方法研究新的虚拟信息空间提供了重要机遇。众所周知,建模与仿真技术的优势在于提供了从现实世界到虚拟空间的桥梁,为研究人类社会和物理世界的未知领域提供了替代。然而,虚拟信息空间是一个完全不同于物理世界和人类社会的全新的虚拟空间,这个虚拟空间不仅是“人、机、物”三者相结合的空间,还存在着多层网状、跨领域关联的特点,对这种新的虚拟空间的研究是一个复杂的、当前的科学研究领域。在充分利用复杂性科学研究成果的基础上,利用并行系统、嵌入式仿真等方法构建通向这一新型空间的桥梁,为研究对象之间的相互作用或行为特征提供一种虚拟的替代方案。利用复杂性科学的成果不断修改和测试所建立的模型,是建模与仿真科学进一步发展需要解决的问题。
通过将模拟技术与人工智能相结合来增强人工智能能力的学习体验平台(LXP)的概念框架
工具。特别是对于人工智能经验水平较低的人来说,方法和工具缺乏清晰度。将人工智能集成到 LXP 中并将其与仿真和自动化技术相结合,可以进一步增强上述应用领域的学习体验。通信小部件和学习机器人可用于为用户定制学习路径。人工智能机器人和小部件提供有用的复习和支持提示,并提醒用户重要的里程碑。根据分析的用户数据,将发布个性化的学习和培训建议。模型工厂与仿真技术的集成使创业流程、问题和行动决策的嵌入成为可能。该框架旨在加强科学和工业领域对人工智能知识转移的必要需求。

数字化艺术:潜入E-Estonia
爱沙尼亚的现代化旅程开始恢复1991年苏联独立。过渡期的特征是重大的经济挑战,包括过度通货膨胀,缺乏私有化资源以及创建新的机构框架的需求。尽管有这些障碍,爱沙尼亚还是在逆境中获得了机会,并踏上了全面的技术现代化道路。在1990年代初期,爱沙尼亚面临着从头开始建立新的技术基础设施的艰巨任务,这在很大程度上依赖于过时的苏联时代系统。尽管不到50%的人口可以访问电话,爱沙尼亚政府做出了一个关键的决定,将从模拟技术跳到数字技术,从芬兰降低了旧的模拟电话交换系统的要约,以支持数字未来。这种战略选择导致了手机和其他数字技术的迅速采用,完全绕过了中间模拟技术[1-4]。

1 费德里科·圣玛丽亚理工大学土木工程系,瓦尔帕莱索(智利),felipe.araya@usm.cl *通信地址:felipe.araya@u
摘要:尽管离散事件模拟 (DES) 一直是施工运营研究中首选的模拟技术,但它也存在一些局限性,例如只关注运营层面。为了最大限度地减少 DES 局限性的影响,研究人员提出了将 DES 与其他模拟技术相结合的方法,例如基于代理的建模 (ABM)、系统动力学 (SD) 和虚拟环境 (VE)。然而,很少有研究讨论这种集成过程是否以及在多大程度上最大限度地减少了 DES 的局限性。本研究总结了 2010 年至 2020 年期间发表的现有文献中的 99 篇期刊手稿,重点研究了 DES 与 ABM、SD 和 VE 的集成。本研究发现,DES 与 ABM、SD 和 VE 的集成解决了 DES 的多个局限性,即面向过程的建模中缺乏人类行为、战略视角有限以及与 DES 模型输出的验证和确认相关的挑战。最终,本研究呼吁未来的研究评估 DES、ABM 和 SD 建模技术的同时集成,以便真正解释建筑项目的复杂性,因为综合模拟工具需要整合多种方法来抵消它们的局限性。
分布式交互式战斗模拟
分布式交互式仿真 (DIS) 是将飞机、坦克和其他军事模拟器连接在不同位置,以便一个模拟器的乘员可以“看到”、操作、“射击”或被模拟的其他车辆“摧毁”。指挥结构也可以模拟。这使部队可以在过于昂贵或危险的情况下进行练习和训练,而无法使用真实武器进行练习。模拟器是 Link Trainer 的技术后代,Link Trainer 是 1929 年推出的著名飞行模拟器。现代车辆模拟器使用电子数字计算机来计算仪表指示、视觉显示和声音应如何响应用户的控制操作而变化。过去十年中,一个突出的趋势是细节和表面真实感的提高,越来越便宜的计算能力可以生成和显示直升机飞行员可能通过座舱看到的场景,或坦克乘员可能通过潜望镜看到的场景。将模拟器的计算机连接到网络,使用互联网和其他技术以及标准通信程序,使每个模拟器机组人员能够与其他机组人员进行团队合作练习。本背景论文是技术评估办公室 (OTA) 对战斗建模和模拟技术评估的第三份出版物。它补充了 OTA 的背景论文《虚拟现实和战斗模拟技术》,该论文侧重于人机交互。