XiaoMi-AI文件搜索系统
World File Search System段距离

距离成像计量:调查、校准和...
近年来,已经出现了许多用于捕捉三维环境和物体的传感器系统。除了激光扫描仪和大地测量全站仪外,这里还必须列举立体视觉和基于三角测量的系统。特别是激光扫描仪在速度和准确性方面已成为最先进的技术,能够捕捉数十米大小的物体。激光扫描仪的主要缺点是它们的顺序操作模式。它们逐点测量。几年前,开发了一种功能齐全的新技术,能够同时以高分辨率捕捉环境。所谓的范围成像 (RIM) 或闪光激光雷达相机基于数字成像技术,并具有测量每个像素中相应物体点距离的能力。距离测量基于直接或间接飞行时间原理。由于其并行采集高达视频帧速率,RIM 相机甚至可以捕捉移动物体。就光学依赖性而言,可以得出所捕获场景的 3-D 坐标。距离测量的标称精度为几毫米。如果属性和特性变得稳定且可预测,RIM 可能成为许多应用的首选技术。例如,汽车、机器人和安全系统。标称坐标和测量坐标之间的显著偏差发生在几厘米的范围内。只有深入的研究才能帮助达到这里的理论极限。本论文讨论了影响 RIM 相机测量的几个方面。首先,简要介绍与 RIM 相关的基本技术。除了成像和距离测量方法外,RIM 还区分了两个基本原理。此外,重点放在特定的限制上。在这项工作期间,有三种不同的相机问世:瑞士 CSEM / MESA Imaging 的 SwissRanger SR-2 和 SR-3000,以及后来德国 PMDtec 的 3k-S。这三款相机基于间接飞行时间原理,配备了不同的复杂功能。除了集成的校准和校正功能外,抑制背景照明也是主要功能之一。但是,这些相机仅用于高度发达的演示。根据所需权利要求,对特定应用领域(如汽车或机器人)的适应性可产生专门的属性。对现有相机类型的分析有助于更深入地了解该技术。所分析相机的原始数据精度不超过几厘米。为了研究现有相机的属性,必须开发特殊的实验装置。这项工作的主要部分涉及 RIM 相机组件的研究和校准。通过摄影测量相机校准解决光学系统的几何偏差。根据偏差和统计数据分析距离测量系统。因此,指出了精度和准确度的局限性。除了散射效应的影响外,还讨论了积分时间、发射系统和入射角、目标反射率、外部和内部温度以及最终的线性度和固定模式噪声。此外,还介绍了一种系统校准过程的方法。由于影响参数的复杂性,尚未对各种影响参数的测量数据进行完整的校正。但高度系统的依赖关系预示着未来会出现复杂的校准程序。这项工作有助于理解传感器。

节能且注重隐私的社交距离......
摘要 — 低分辨率红外 (IR) 传感器与机器学习 (ML) 相结合,可用于在室内空间实施隐私保护社交距离监控解决方案。然而,需要在物联网 (IoT) 边缘节点上执行这些应用程序,这使得能源消耗至关重要。在这项工作中,我们提出了一种节能的自适应推理解决方案,由一个简单的唤醒触发器和一个 8 位量化卷积神经网络 (CNN) 的级联组成,该解决方案仅用于难以分类的帧。在物联网微控制器上部署这种自适应系统,我们表明,在处理 8x8 低分辨率红外传感器的输出时,与基于静态 CNN 的方法相比,我们能够将能耗降低 37-57%,准确度下降不到 2%(83% 的平衡准确度)。索引术语 — 边缘计算、自适应推理、社交距离、能源效率、红外传感器
量子距离到不可控性和量子速度......
就像我们日常使用的计算机一样,普适性——原则上运行任何算法的能力——是量子计算的核心概念。在当前证明普适性的竞赛中,以及在更大的系统中首次成功报告普适性[1],这一点比以往任何时候都更加真实。人们经常争论[2],普适性本身就是普遍的,例如几乎所有系统都是普适的,如果不是,稍微改变一下参数就会变成普适的。即使在嘈杂的系统中也是如此,在这种系统中,普适性需要与错误校正相结合。然而,我们认为,这还有另一面:如果任何非普适系统接近普适系统,那么许多普适系统也危险地接近非普适系统。那么普适性可能是不稳定的或低效的。事实上,大自然似乎不愿探索高维动力学[3],而简单的非普适系统往往是很好的近似值。致力于设计量子光学中的弱非线性、超导系统中的弱非谐性或避免固态系统中的光谱拥挤的实验物理学家非常清楚这些限制。在这里,我们将这种直觉放在一个精确的框架中,我们称之为可控性的量子距离,并展示它与一个众所周知的难以计算但独立有趣的量的关系:量子速度极限 [4–6]。值得指出的是,有许多不同的速度极限,一些用于状态变换,一些用于幺正变换;一些用于不受控动力学,一些用于受控动力学,请参阅 [4] 中的综述。我们在这里关注的是系统的受控演化。
REV-31-1505 – 2M 距离传感器数据表
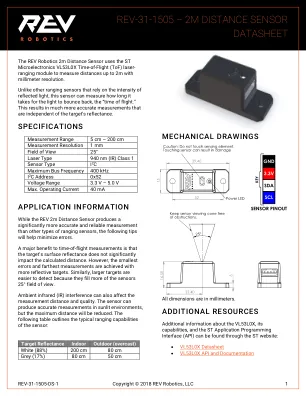
飞行时间测量的一个主要优点是目标的表面反射率不会显著影响计算的距离。但是,反射率更高的目标可实现最小的误差和最远的测量。同样,较大的目标更容易检测,因为它们占据了传感器 25° 视野的更多部分。

讲座 7:测量量子态之间的距离
场景:从集合中辨别状态。在前面的场景中,Bob 以概率 λ 收到量子态 ρ 0 ,以概率 1 − λ 收到量子态 ρ 1 。现在让我们将这个场景推广到两个以上的量子态:同样,Alice 站在一个有 n ∈ N 个按钮的设备旁边。按下按钮 “i” 后,设备从某个量子态集合 { ρ 1 , ... , ρ n } ⊂ D ( H ) 中发射一个量子态为 ρ i 的粒子。同样,Bob 抓住粒子,使用 POVM µ : { 1 , ... , n } → B ( H ) + 对其进行测量,并猜测如果 Alice 收到该结果,则他按下了按钮 j 。假设 Alice 按照概率分布 p ∈P{ 1 , ... , n } 按下按钮,Bob 猜测的最佳成功概率是多少?同样,给定一个特定的 POVM µ : { 1 , . . . , n } → B ( H ) + ,我们可以将成功概率表示为

我们距离新冠疫苗还有多远?
本综述概述了 COVID-19 候选疫苗的主要方面和疾病的病理生理学。本综述分析了针对 COVID-19 开发的生物技术候选疫苗的类型、其保护程度和疾病的病理生理机制。研究了开发生物技术候选疫苗的关键所基于的文献数据。回顾了可以参考各种生物技术候选疫苗的数据。为此,利用了最新的文献数据。成功开发需要技术基础设施的疫苗的方法是综合从长期试验中获得的数据并随后将其付诸实践。通过重组 DNA 技术开发的疫苗将成为人们进一步研究的灵感来源。经过快速的疫苗开发过程,COVID-19 疫苗的使用可以在人群中成为主流以预防疾病。作为这些实践的结果,将在阶段研究后评估哪种疫苗更安全、更可靠和更有效。

1距离很长一段路?当代人造...
Sorich 4,Ishish Seth 5,James Gorcilov 6,Matthew Lim 1,Liam McCoy 7,Andrew vanlint 1,6,

悬垂距离的电池检查-Dragonfly
通过计算机断层扫描(CT)进行的X射线检查允许对电池进行质量评估,对于锂离子电池特别有用。ct可以轻松检查空隙,裂缝,分配和阳极分量之间的距离距离。在此应用程序注释中,我们使用Dragonfly 3D World软件展示了CT的电池检查功能。特别是,对深度学习模型进行了训练,可以自动分割悬垂 - 该模型可以应用于任何类似的扫描 - 例如,如果您扫描了100个电池,则可以使用相同的模型在所有扫描中分割悬垂。

将机器人几何形状表示为距离字段
摘要 - 在这项工作中,我们提出了一种新的方法,将机器人几何形状表示为距离场(RDF),该方法将签名距离场(SDF)的原理扩展到铰接的运动链。我们的方法采用了伯恩斯坦多项式的组合,以高精度和效率编码每个机器人链路的签名距离,同时确保SDF的数学连续性和不同性。我们进一步利用机器人的运动学链来在关节空间中产生SDF表示,从而允许以任意关节配置进行稳健的距离查询。提议的RDF表示在任务和关节空间中都是可区分和平滑的,使其直接集成到优化问题。此外,机器人的0级集合对应于机器人表面,可以将其无缝整合到全身操纵任务中。我们在模拟和7轴Franka Emika机器人中进行了各种经验,与基线方法进行了比较,并证明了其在避免碰撞和全身操纵任务方面的效率。项目页面:https://sites.google.com/view/lrdf/home