XiaoMi-AI文件搜索系统
World File Search System测深

对DeepFake及其检测技术的全面综述
摘要 - 在数字媒体时代,DeepFake技术已成为一个重大关注的问题,通过实现高度现实的合成内容来对各个部门构成威胁。本文介绍了深层技术和检测方法的全面综述。它分析了14个研究论文,涵盖了一系列方法,包括机器学习算法,计算机视觉技术和信号处理方法。探索的关键方面包括面部和语音操纵,多模式融合以及注意力机制的使用。评论重点介绍了检测深击的挑战,例如数据集偏见以及创建者和探测器之间的武器竞赛。此外,它讨论了当前检测技术的局限性以及对可靠的可扩展解决方案的需求。通过对文献的批判性分析,本综述提供了对现有方法的优势和劣势的见解,并确定了未来研究的领域。本文有助于理解深层技术及其对社会的影响,强调开发有效的检测机制以打击合成媒体的传播的重要性。
马翁地下水开发项目第一阶段
E-1. 项目区域位置图 E-2. 勘探区域位置 E-3. 奥卡万戈河在莫亨博及其选定支流的年地表水流量 E-4. 记录的各水源水量百分比(1989 年至 1996 年)- 马翁供水区 E-5. 数字地形图 E-6. Landsat 专题制图仪图像 E-7. 机载电磁电导图 E-8. 初始阶段和最终勘探区域的勘探区域边界对比 E-9. 沙舍河谷人工补给试验场 E-10. 沙舍河谷钻孔位置图 E-11. 沙舍河谷地质横截面 E-12. 根据 TEM 测深解释得出的上博罗河谷电阻率剖面 E-13. 第 1 阶段,建议开发:沙舍河谷和下塔马拉卡内河谷 E-14。第 2 阶段,推荐开发计划:上塔玛拉坎河谷和上博罗河谷 E-15. 项目实施时间表 E-16. 马翁资源开发计划大纲

hgcdte apds检测器的开发在CEA/LETI的大气激光雷达和空间光学通信
HGCDTE APD检测器模块电信是在CEA/LETI上开发的,用于大气刺激和自由空间光学(FSO)。开发是由可以在每个检测器模块中调整的通用子组件的设计和制造驱动的,以满足每个应用程序的特定检测器要求。从目前为大气激光雷达开发的探测器模块所设定的挑战详细介绍了此类子组件的优化,该挑战在AIRBUS的R&T CNES项目的范围内以及H2020 Project holdon的R&T项目范围以及FSO,以及在ESA项目的范围内与Mynaric Laserc的lasercom lasercom gmbhhs of airbus和FSO。最近已将两个检测器模块传递到空中客车DS进行广泛的LIDAR仿真测试。表明,与先前开发的大面积检测器相比,输入噪声,NEP = 10-15fw/√Hz(5个光子RMS)已减少了三分,尽管带宽已增加到180 MHz,以响应高空间深度分辨率的要求。在发现短光脉冲后200 ns时,时间延迟为10 -4,这与诸如测深分析之类的激光雷达应用兼容。
单点系泊 - KR e-class
在建造开始前,应提交显示结构主要部件、相关管道和设备的尺寸、布置和细节的图纸,以供审查和批准。这些图纸应清楚地标明尺寸、接头细节和焊接或其他连接方法。一般而言,图纸应包括以下内容(如适用)。(1) 总体布置 (2) 水密隔间布置图,包括水密和风雨密封闭装置的位置、类型和布置 (3) 结构布置,显示船壳板、框架、舱壁、平板、主构件和支撑构件、接头细节(如适用) (4) 水密门和舱口细节 (5) 焊接细节和程序 (6) 腐蚀控制装置 (7) 永久压载物的类型、位置和数量(如果有) (8) 舱底、测深和通风装置 (9) 危险区域 (10) 电气系统单线图 (11) 消防安全设备的位置 (12) 系泊布置 (13) 系泊组件,包括锚腿、相关硬件、缆绳和缆绳负载挠度特性 (14) 系泊组件、工业设备等的基础显示船体结构附件 (15)锚固系统显示锚的大小、桩的承载能力、桩的尺寸和 ca-
单点系泊 - KR e-class
建造前,应提交图纸审查并批准每个 SPM 的结构、相关管道和设备的主要部件的尺寸、布置和细节。这些图纸应清楚地标明尺寸、接头细节和焊接或其他连接方法。一般而言,图纸应包括以下内容(如适用)。 (1) 总体布置 (2) 水密分隔布置图,包括水密和风雨密封闭装置的位置、类型和布置 (3) 结构布置,显示船壳板、骨架、舱壁、平板、主要构件和支撑构件、接头细节(如适用) (4) 水密门和舱口细节 (5) 焊接细节和程序 (6) 腐蚀控制装置 (7) 永久压载物的类型、位置和数量(如有) (8) 舱底、测深和通风装置 (9) 危险区域 (10) 电气系统单线图 (11) 消防设备位置 (12) 系泊布置 (13) 系泊组件,包括锚腿、相关硬件、缆绳和缆绳负载挠度特性 (14) 系泊组件、工业设备等的基础,显示与船体结构的附件 (15) 锚泊系统,显示锚的尺寸、桩的抓力、桩的尺寸,并
海洋地貌测量学的回顾,海洋地貌测量的定量研究...
摘要。地貌测量学是一门定量描述地形特征的科学,传统上侧重于陆地景观的研究。然而,数字测深数据的可用性急剧增加,以及使用地理信息系统 (GIS) 和空间分析软件进行地貌测量研究的日益便捷,引起了人们对使用地貌测量技术研究海洋环境的兴趣。在过去十年左右的时间里,已经应用了大量地貌测量技术(例如地形属性、特征提取、自动分类)来表征从沿海地区到深海的海底地形。然而,地貌测量技术在海洋中的应用并不像在陆地环境中那样多样化,也不像在陆地环境中那样广泛。这至少部分是由于捕捉、分类和验证水下地形特征的困难。然而,陆地和海洋地貌测量应用之间有很多共同点,重要的是,在开发海洋地貌测量时,我们要从陆地研究的经验中学习。然而,并非所有陆地解决方案都可以被海洋地貌测量研究采用,因为海洋环境的动态、四维 (4-D) 特性在整个地貌测量工作流程中都会引起自身的问题。例如,水下定位问题、变量

D-4 - 土地和自然资源部 - Hawaii.gov
根据夏威夷行政法规 (HAR) § 11-200.1-16 和环境委员会于 2020 年 11 月 10 日审查并同意的土地和自然资源部 (Department) 豁免清单,根据一般豁免类型 1,该主题请求免于准备环境评估,该类型规定:“对现有结构、设施、设备或地形特征的操作、维修或维护,涉及对先前存在的使用进行轻微扩展或轻微更改”和第 1 部分第 44 项规定:“由部门颁发的常规许可证、执照、注册和进入权,涉及对先前存在的影响可以忽略不计”和一般豁免类型 5 规定:“基本数据收集、研究、实验管理以及资源和基础设施测试和评估活动不会对环境资源造成严重或重大干扰”和第 1 部分第 1 项规定:“对现有环境条件(如噪音、空气质量、水流、水质等)”、第 2 项规定“非破坏性数据收集和清查,包括实地、航空和卫星测量和制图”、第 3 项规定“进行地形、测深、波浪、沿海运输、水深和位置调查”、第 12 项规定“进行陆地和海洋考古调查”、第 19 项规定“进行规划和可行性研究”、第 20 项规定“允许进入土地进行上述活动”。
激光探索 1 - 波涛之下:看到证据......
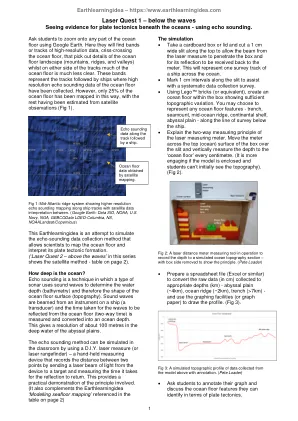
图1:中大西洋山脊系统显示较高的分辨率回声沿着船只轨道映射,并在卫星数据之间进行卫星数据解释。(Google Earth:Data Sio,NOAA,美国海军,NGA,Gebcodata ldeo-Columbia,NS,Noaalandsat/Copernicus)此EarthlearneNingIdea是一种试图模拟回声数据收集方法的试图,该方法允许科学家绘制海洋底层并解释其板块构造的板块。(本系列中的“激光任务2 - 在波浪上方”显示了卫星方法 - 第2页上的表)。海洋有多深?回声声音是一种技术,其中一种声纳使用声波来确定水深(测深),从而确定海底表面的形状(地形)。声波是从船上的仪器(换能器)上的仪器中射出的,并测量了从海底(双向时间)反射的波浪所花费的时间,并将其转换为海洋深度。这在深渊平原的深水中提供了约100米的分辨率。可以使用D.I.Y.可以在教室中模拟回声声音。激光测量(或激光测距仪) - 手持测量设备,通过将激光从设备发送到目标,并测量反射返回所需的时间,记录两个点之间的距离。这提供了涉及原则的实际证明。(它还补充了第2页的表中所引用的地球“建模海底映射”)

双模三通道光接收系统设计
关键词:雷达 海岸 光学接收系统 双频 三通道 摘要:海岸带多潮间带、岛礁,传统的船载声学测量方法效率极其低下,因此海岸带三维综合测量一直是遥感领域的一个难点。由于海水蓝绿光窗透明度好,激光点云数据能快速准确区分浅海水体地形特点。目前国际上对海岸带最有效的探测方式是机载双频激光雷达探测技术,该技术测量速率高,覆盖范围广。激光器同时输出1064nm和532nm双波长激光,1064nm激光形成海面回波,532nm激光穿透海水形成浅海和深海回波。但在海水传播过程中,随着水深的增加,光子散射数增多,会造成回波信号的衰减。因此对大动态范围内的弱光探测精度不高,一直是近岸航空测深的难点。针对这一问题,设计了分场三通道光学接收系统。ZEMAX仿真结果表明,双通道激光雷达三通道接收光学系统有效降低了光学元件与通道间的光串扰,实现了不同水深通道的能量收集。该结构对光电信号进行了动态压缩,提高了信噪比。

斐济夏季
由于我的一时疏忽,上个月我在布列塔尼的莫尔比昂湾航行时没有带电子海图。我那台老旧的 Garmin 手持设备的电池终于没电了,而我崭新的 Raymarine eS97 绘图仪的海图卡还没有到。此外,新的测深仪尚未校准,深度最多只有 0.5 米。我独自在相对陌生的水域航行,因此我非常警惕。在 15 节的微风中,我小心翼翼地收帆,当我们以高达 11 节的速度乘坐潮汐通行机时,小小的 Plastimo 手持罗盘一直贴在我的眼睛上。关键点靠近这片内海的入口,位于 Ile Berder 和 Ile de la Jument 之间。有时潮汐速度一定有 4 节左右。不知不觉中,我们驶入了基伯龙半岛顶端的礁石和岛屿链内的受保护海域。领航员警告说,我的目的地——胡阿特岛(发音为“什么”)上的一个深沙湾,如果向南,那里可能会有岩石,但我还是冒险驶入海湾的角落,那里有岩石可以最好地保护它免受南面的侵袭。天气很冷——那天晚上可能只有 5°C,但当夏日之歌用她惯常的船声把我摇入梦乡时,我很难不觉得一切都很好。第二天,风向刚好向后退了一点,让我可以近距离到达 25 英里外的洛里昂。这是一段旅程,