XiaoMi-AI文件搜索系统
World File Search System测量程序
待机 3000 kVA 2400 ekW 50 Hz 1500 rpm 400 伏
符合或超过国际规范:· AS1359、CSA、IEC60034、ISO3046、ISO8528、NEMA MG 1-33、UL508A、98/37/EC 燃油率基于 35º API(16º C 或 60º F)比重的燃油,在 29º C (85º F) 下使用时,其 LHV 为 42 780 kJ/kg(18,390 Btu/lb),重量为 838.9 克/升(7.001 磅/美国加仑)。排放数据测量程序与 EPA CFR 40 第 89 部分 D 和 E 子部分以及 ISO8178-1 中描述的用于测量 HC、CO、PM 和 NOx 的程序一致。所示数据基于稳定状态运行条件,即 77ºF、28.42 HG 和 2 号柴油,API 为 35º,LHV 为 18,390 btu/lb。所示标称排放数据受仪器、测量、设施和发动机间差异的影响。排放数据基于 100% 负载,因此不能用于比较使用基于加权循环的值的 EPA 法规。
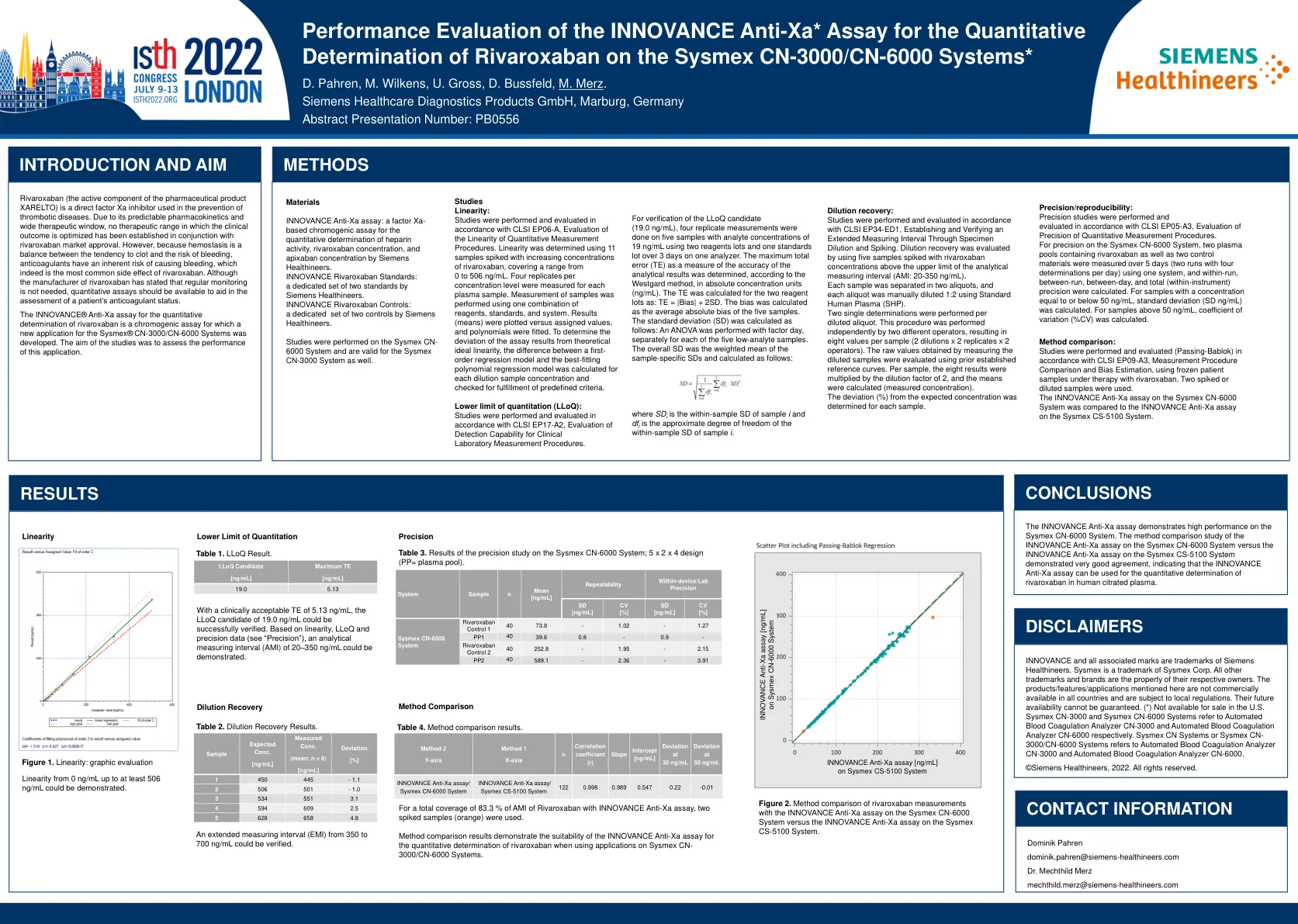
对创新反XA*的性能评估,用于在Sysmex CN-3000/CN-3000/CN-6000系统上定量确定Rivaroxaban*
研究线性:根据CLSI EP06-A进行研究和评估,评估定量测量程序的线性。线性使用11个样品,并以增加浓度的利伐沙班(Rivaroxaban)峰值,覆盖0到506 ng/ml的范围。每个等离子体样品测量了每个浓度水平的四个重复。使用一种试剂,标准和系统的组合对样品进行了测量。结果(均值)与分配的值相比,并拟合多项式。 确定分析的偏差是由理论理想线性导致的,计算了每种稀释样品浓度的一阶回归模型与最合适的多项式回归模型之间的差异,并检查了预定义的标准。结果(均值)与分配的值相比,并拟合多项式。确定分析的偏差是由理论理想线性导致的,计算了每种稀释样品浓度的一阶回归模型与最合适的多项式回归模型之间的差异,并检查了预定义的标准。

基于数字孪生的起重机的混合现实界面
摘要:数字孪生技术通过不断增加的数据量为工业世界的数字化转型提供了助力,同时也为设计用于操作机器的人机界面 (HMI) 创造了挑战性环境。这项工作旨在为基于数字孪生的服务创建 HMI。以工业起重机平台为例,我们介绍了一款在 Microsoft HoloLens 1 设备上运行的混合现实 (MR) 应用程序。该应用程序由可视化、交互、通信和注册模块组成,允许起重机操作员通过交互式全息图和双向数据通信来监控起重机状态和控制其运动,并通过 MR 环境的空间注册和跟踪增强了移动性。我们按照为标准化测量程序而定义的分步协议,对原型进行了 20 次测量的控制精度定量评估。结果表明,目标位置和实际位置之间的差异在三维空间中在 10 厘米范围内,对于典型的物流起重机操作用例而言,这被认为足够小,并且可以在我们未来的工作中采用强大的配准和跟踪技术来改进。
2024 年春季 M-STEP 报告解释指南
学生在每次有效测试中都会获得 ELA、数学、科学和社会研究方面的总体量表分数。量表分数是报告的基本单位。量表分数是根据学生在测试中获得的总分数计算得出的,经过统计调整后转换为一致的标准化量表,以便直接公平地比较同一管理年度或跨年度不同形式的测试的分数。已建立的心理测量程序用于确保给定的量表分数代表相同的表现水平,无论测试形式如何。量表分数特别适合比较同一年级不同学生群体每年的表现,并保持多年内的相同表现标准。虽然量表分数在同一年级特定内容领域的测试之间具有可比性,但它们无法在内容领域或年级之间进行比较。M-STEP 是一种基于标准的测试,用于评估每个年级的标准;4 年级标准的分数并不能提供有关学生 5 年级标准表现的任何信息。
农业工业综合体的数字化:量子密码系统现存漏洞分析
在非相干攻击中,攻击者分别处理从重新传感器接收到的每个光子。最简单的选择是上述拦截攻击 - 发送光子。由于在这种攻击期间,光子不会沿着通信线路进一步传递,但会发送新的光子,因此这种策略称为不透明的。非相干攻击也是将量子样本与通过信道发送的光子纠缠在一起的攻击。在这种情况下,每个光子都会与独立于其他光子的单独分解混淆,并且相互作用的光子会发送到接收器。现在,攻击者可以将样本存储在量子存储器中,并在公开的消息交换结束后分别测量它们的状态。窃听公开的消息允许人们找出发送者的基础,从而选择最佳测量程序以获取有关密钥的更多信息。这种攻击是半透明的,因为攻击者混淆其样本的光子的状态会发生变化。通过减少攻击者收到的密钥信息量,可以降低攻击者引入的错误级别 [14]。

NPL 报告 QM119 环境部...
1996 年 3 月 NPL 报告 QM 119 环境部技术合作伙伴 - 技术基础设施计划 - 窗框结构热性能设计工具的验证:通过商定的测量程序进行独立验证。第一阶段报告 - 比较由隔热铝框、PVC-U 框和硬木框组成的三个窗户系统的测量和模拟 U 值。Ray Williams(国家物理实验室)Richard Harris(窗户和覆层技术中心)摘要本报告总结了上述项目第一阶段的结果。使用 CEN/TC 89 N 216E rev 中指定的程序在 NPL 壁式防护热箱中测量三个窗户系统的 U 值和表面温度。与 CWCT 使用 prEN 30077 第 1 部分和第 2 部分中规定的程序计算和模拟的结果进行了比较。测量和模拟的 U 值之间的一致性表明良好,使用简化程序计算的 U 值与测量的 U 值之间的一致性也足够。提出了一些建议来改进 prEN 30077 的第 1 部分和第 2 部分。

调查主观工作量评级 (NASA TLX) 和主观情境意识评级 (SART) 对认知复杂的人机工作的有效性
主观工作负荷和态势感知指标,如 NASA 任务负荷指数 (TLX) 和态势感知评分技术 (SART),经常用于人机系统评估。然而,这些评分的解释存在争议。在本研究中,通过比较操作员在执行场景后立即收集的评分和操作员通过视频回顾场景获得实际系统状态知识后收集的评分,调查了这些指标理论假设的经验证据。18 名有执照的控制室操作员参加了模拟器研究,运行了 12 个相对具有挑战性的场景。结果发现,在操作员获得事实场景知识后,对涉及内省的 TLX 项目的解释保持稳定,而对涉及对外部事件的感知的项目(如态势感知和表现)的解释则取决于操作员的场景知识。结果表明,操作员的评分可以区分心理努力、表现、挫折和态势感知。没有发现 SART 指数作为态势感知衡量标准的明确证据。相反,为本研究开发的主观情境意识测量方法与工作量不同,与操作员绩效相关,表明这种类型的测量方法值得未来研究其有效性。研究结果有助于制定测量程序

3832072.pdf - Hindawi.com
本文进行了一项实验分析,重点是利用一种特定的测量技术来确定收缩的发展情况,并监测细粒水泥基复合材料在老化过程中的结构变化。设计并验证了先进的测量设备和程序,可以同时测量长度变化、质量损失、声学响应和温度发展。进行的实验的主要范围是寻找所研究特性之间的关系,同时保持统一的测试设置。为了进行实验测量,设计和制造了三种细粒水泥复合混合物。这些混合物的水灰比 (w/c) 和增塑剂的用量不同。测量输出以图表的形式呈现,显示了所研究参数之间的关系,例如复合材料固化过程中的相对长度变化、质量损失、温度变化和声发射 (AE) 活动。测量结果显示所检查的特性之间存在密切的关系。相对长度变化的进展以及质量损失和温度发展的进展都反映在 AE 活动中。先进的测量程序和技术提供了有关水泥基复合材料在早期凝固过程中的行为的宝贵信息

环境保护局 § 1037.528
本节中的滑行程序描述了如何计算第 2 阶段拖拉机、拖车和专用车辆的阻力面积 C d A ,但须遵守 §§ 1037.525 至 1037.527 的规定。这些程序被视为拖拉机的参考方法,但也是拖车的替代方法。遵循 SAE J2263(通过引用并入 § 1037.810)第 1 至 9 节的规定,并遵循本节中描述的说明和例外情况。其中一些例外情况来自 SAE J1263(通过引用并入 § 1037.810)。40 CFR 1066.310 中的滑行程序适用于第 1 阶段拖拉机,而非本节的规定。 (a) 除非另有规定,本节中确定的术语和变量具有 SAE J1263 和 SAE J2263 中给出的含义。 (b) 要确定拖拉机的 C d A 值,请使用制造商的拖拉机和标准拖车对拖拉机-拖车组合进行滑行测试。要确定拖车的 C d A 值,请使用标准拖拉机对拖拉机-拖车组合进行滑行测试。准备拖拉机和拖车进行测试如下: (1) 安装用于执行指定测量的仪器。 (2) 添加车辆仪器后,确认没有制动阻力或其他阻止车轮自由旋转的情况。在本次检查和测量程序结束之间的任何时候都不要使用手刹。
地形建模 (地貌测量) 书目,...
地形建模,即地面量化的实践,是地球科学、数学、工程学和计算机科学的综合体。这门学科有各种名称,如地貌测量学(或简称为形态测量学)、地形分析和定量地貌学。它通过水文学、地质灾害测绘、地质构造学、海底和行星探索以及其他领域的大量应用不断发展。该领域名义上可以追溯到学术地理学的共同创始人亚历山大·冯·洪堡(1808 年,1817 年)和卡尔·里特(1826 年,1828 年),20 世纪后期,计算机操纵地形高度的空间阵列或数字高程模型 (DEM) 彻底改变了该领域,这些模型可以量化和描绘大面积的地面形态(Maune,2001 年)。形态测量程序通常由商业地理信息系统 (GIS) 以及专业软件实施(Harvey 和 Eash,1996 年;Köthe 等人,1996 年;ESRI,1997 年;Drzewiecki 等人,1999 年;Dikau 和 Saurer,1999 年;Djokic 和 Maidment,2000 年;Wilson 和 Gallant,2000 年;Breuer,2001 年;Guth,2001 年;Eastman,2002 年)。《地球物理杂志》的新地球表面版